The Enchanter, a charter fishing vessel on a five-day trip from Mangōnui to the Three Kings Islands with eight passengers and two crew, was struck by a large steep wave on the evening of 20 March 2022 while returning toward Murimotu Island. The impact rolled the vessel onto its side, causing the superstructure to break away and the vessel to capsize. The Emergency Position-Indicating Radio Beacon alerted the Rescue Coordination Centre, prompting a major search and rescue response. Of the ten people on board, only five survived; they were rescued from the upturned hull and debris, while the remaining five were recovered after a two-day search operation.
Executive summary Tuhinga whakarāpopoto


What happened
- The charter fishing vessel Enchanter was on a five-day fishing trip from Mangōnui in Northland to the Three Kings Islands with eight passengers and two crew on board. On 20 March 2022, it was heading back from the Three Kings Islands towards Murimotu Island off North Cape, where the skipper intended to anchor for the night.
- At about 1950 the vessel was broadly east of Murimotu Island when it was struck on its port side by a large steep wave, rapidly rolling the vessel onto its side. The superstructure comprising the main saloon and the flybridge separated from the hull and the Enchanter capsized.
- The New Zealand Rescue Coordination Centre (the RCC) was alerted to the accident by the crew activating their Emergency Position-Indicating Radio Beacon (EPIRB) and initiated a search and rescue response.
- Only five of the ten people survived the accident. The survivors were retrieved from the upturned hull and other floating debris by the first rescue helicopter to arrive at the scene. The bodies of the remaining five people were recovered after an almost two-day search and rescue operation involving multiple aircraft and surface vessels.
Why it happened
- The Enchanter should easily have coped with the sea conditions off North Cape at the time of the accident. However, it is about as likely as not the vessel had strayed into shallower water off Murimotu Island, an area that is prone to occasional, naturally occurring, larger waves peaking as they entered the shallowing water.
- When the Enchanter rapidly rolled onto its side, the force of the water exceeded the design parameters of the vessel’s superstructure. This caused the superstructure to separate from the hull, resulting in the Enchanter fully capsizing.
- Due to the suddenness of the capsize none of the people were wearing or had access to life jackets, and the life rafts likely did not automatically deploy, which left those in the water with no or limited means of flotation.
- None of the four lifebuoys on board had effective retroreflective tape and only two had a strobe light attached. Add to this the absence of life jackets with their strobe lights and retroreflective markings, it would have been difficult to detect the missing people in the water at night.
- There was a significant delay in the search for the five missing people while fuel for the rescue helicopters was sourced. Three of the missing people were alive in the water when last seen by the survivors but were later found deceased.
- Although we cannot determine with any certainty whether it would have changed the outcome in this particular situation, the chances of survival after an accident are greater if search and rescue operations are conducted promptly.
What we can learn
- For any forecast or actual sea conditions, mariners should at any time expect to encounter occasional waves up to twice the average size.
- Mariners should, if possible, avoid navigating in shallow water in adverse wave conditions. If shallow water cannot be avoided, they should be particularly vigilant and expect waves much larger and steeper than those expected in deeper water.
- It is important that passengers either practise putting on a life jacket or are given a demonstration of how to do so during a safety briefing, rather than having to work this out under the pressure of an emergency.
- Safety will be better served if life jackets are distributed in several places around a vessel where they will be more accessible in a sudden emergency.
- Wearing an inflatable life jacket or similar buoyancy aid will enhance the safety of people when fishing from open decks in open and exposed waters.
- There is safety benefit in wearing a personal locator beacon as a backup to the EPIRBs required on commercial vessels, in case the circumstances of an accident prevent the use of the latter.
- Fitting an Automatic Identification System (AIS) or equivalent tracking device to a vessel will significantly improve the likelihood of being found and reduce the time for being rescued, particularly if the primary life-saving equipment fails or cannot be activated.
Who may benefit
- All mariners, maritime regulatory agencies, and agencies and operators involved in search and rescue operations.
Factual information Pārongo pono
Background
- The Enchanter was a 16.2-metre charter fishing vessel operated by Enchanter Fishing Charters, primarily out of Mangōnui in Northland, New Zealand. A group of eight people had booked a five-day fishing charter out of Mangōnui to the Three Kings Islands, beginning on Thursday 17 March 2022.
Narrative
- The eight people (passengers) arrived on board the Enchanter on Wednesday 16 March 2022 and spent the night on board at the berth in Mangōnui. The next morning 17 March 2022, the skipper gave the passengers a safety briefing, which included the location and operation of the various life-saving apparatus. The passengers were told that all the life jackets were stowed under the bunks in the forward passenger cabin but were not shown what they looked like or how to put them on.
- The Enchanter departed Mangōnui at about 0830 with the skipper, first mate and the eight passengers on board. The Enchanter towed fishing lures for the trip to the Three Kings Islands and anchored in Northwest Bay on Great Island for the night (see Figure 3). The weather was fine with light winds.

- On 18 March 2022 the Enchanter went to Middlesex Bank to fish for the day and returned to Northwest Bay on Great Island for the night. Again, the weather was fine with light winds.
- On 19 March 2022 the Enchanter went to King Bank to fish for the day and returned to Little Bear Bay on Great Island for the night. Again, the weather was fine with light winds.
- The skipper chose Little Bear Bay on the southwest side of Great Island to shelter from forecast northeast conditions associated with a weather system that was to pass over the area during the night.
- The weather system passed through the area as forecast. At about 0600 on 20 March 2022 it was still raining and the winds were strong from the northeast. The Enchanter remained at the Little Bear Bay anchorage while the passengers breakfasted and fished in the bay. The weather began to ease, so at about 1030 the Enchanter left Little Bear Bay and headed for the Princes Islands about five nautical miles (nm) to the northwest. There they fished in the lee of the islands until 1330, at which time the skipper judged the sea conditions had eased sufficiently to make the journey to North Cape. Their intention was to anchor for the night in the lee of Murimotu Island (see Figure 2).
- The weather conditions for the first part of what was to be about a seven-hour trip were described as between two- and three-metre waves with the wind still blowing about 20 knots from the northeast.
- By 1700 the weather had cleared, and the sea conditions eased enough for the skipper to allow the passengers to open the side windows to the main saloon. They also deployed the towed fishing lures.
- At 1940 the skipper called Far North Radio on the VHF radio and advised of their intention to anchor for the night ‘under’ Murimotu Island. It was agreed that the skipper would call Far North Radio once the Enchanter was anchored, in approximately one hour.
- As the Enchanter closed with the coastline near North Cape, six of the passengers were relaxing in the saloon, one was asleep in the forward cabin and one was seated on the aft deck monitoring the fishing rods. The first mate was in the galley cooking the evening meal and the skipper was on the flybridge navigating the vessel. The Enchanter was being steered by autopilot. During an initial interview the skipper said that they had “just started to turn to get us down” (indicating a change in heading to head more southerly). This was when the vessel was broadly north-northeast of Murimotu Island and before it reached a waypoint (a specified point on a chart for a planned passage) on the chart plotter, which the skipper indicated was broadly east-southeast of Murimotu Island. The skipper later clarified that only one course adjustment of about 10 degrees in a southerly direction had been made on the automatic pilot, and that this was to regain the track to this waypoint.
- The sky was clear, and it was just on dark. At about 1950 the vessel encountered a large steep wave on its port side. The wave rolled the vessel to starboard in an instant. The superstructure and windows on the starboard side were forced into the water and imploded. The vessel continued to roll and capsized. During the capsize sequence the superstructure comprising the main saloon and flybridge separated from the hull. The hull remained inverted but afloat. The floor of the flybridge (which was the roof of the main saloon below) lay inverted, floating next to the capsized hull.
- Seven of the eight passengers and the first mate were either ejected or escaped from the vessel into the water. The passenger who was sleeping in the forward cabin was trapped there. The skipper was able to escape from the inverted flybridge.
- Within minutes of the accident, the first mate climbed on top of the inverted hull and made a headcount. Including the first mate, nine people had survived the initial capsize. Two (the skipper and one passenger) had climbed on top of the inverted flybridge, the first mate and two passengers were on the inverted hull, and four passengers were in the water. One of those four in the water had retrieved a lifebuoy, which they had placed over their head and under their armpits.
- Within minutes the first mate noticed another of the four passengers in the water floating face down. The first mate entered the water and attempted revival while swimming the passenger to the inverted flybridge. Despite the combined efforts of those on the inverted flybridge, the passenger remained unresponsive. Sometime later the body drifted away from the flybridge despite attempts to secure it to the flybridge.
- Sometime before 2017, the Enchanter’s Emergency Position-Indicating Radio Beacon (EPIRB) surfaced next to the skipper. The EPIRB had been secured in a float-free bracket on the deck at the back of the flybridge (now underneath the inverted flybridge floor). The EPIRB was designed to float free from its bracket when submerged and automatically activate. However, the EPIRB had not activated so it was manually activated and tied to the inverted flybridge.
- Meanwhile the inverted hull and flybridge had drifted apart. At that time the situation was:
- two passengers were on the inverted hull (2)
- the skipper, first mate and one passenger were on the inverted flybridge (3)
- three passengers were last seen alive in the water, one with a lifebuoy (3)
- one passenger was assumed deceased and in the water (1)
- one passenger was unaccounted for. (1)
Search and rescue
- At 2017 the New Zealand Rescue Coordination Centre (the RCC) received an initial beacon alert from the Enchanter’s EPIRB, indicating a distress off North Cape. Using the registration details for the EPIRB the RCC contacted the Enchanter’s shore base and established that the Enchanter was operating near North Cape. At about 2020 the RCC received the first encoded (see Appendix 5 for a detailed description of the data obtained from the EPIRB) transmission from the EPIRB, which included global positioning system (GPS) coordinates.
- At 2030 the RCC directed the Marine Operations Centre to issue mayday relays on VHF Channel 16, requesting all vessels in the vicinity to aid in the response. There were no vessels in the immediate area at that time.
- At about 2035 the RCC briefed the Coastguard New Zealand (Coastguard) Duty Officer, who was based in Auckland. Coastguard’s northernmost unit, Coastguard Houhora, was then tasked to respond. The RCC also tasked (assigned as an asset to be used for the SAR event) the Northland Emergency Services Trust (NEST) helicopter crew based in Whangarei. The NEST crew gave an estimated time to departure of 20–30 minutes.

- At 2109 Coastguard advised the RCC that, having conducted a risk assessment, they would not be able to respond at night due to the limitations of their vessel and the severity of the weather forecast. They also believed that there would be no air support in the area until the weather abated. At 2110 NEST advised the RCC there would be a delay while they assembled the appropriate helicopter crew. NEST also requested the RCC to task another helicopter from the Auckland Rescue Helicopter Trust (ARHT) to assist with the response, which the RCC completed at approximately 2200.
- At 2205 the NEST helicopter departed from Whangarei. NEST maintained a fuel trailer at Kaitaia Hospital. As this was the most northerly point where fuel would be available, both helicopter crews planned to land and refuel from the trailer to maximise their time on scene at North Cape (see Figure 4)
- At 2250 the NEST helicopter arrived at Kaitaia Hospital to refuel and at 2313 departed Kaitaia, heading for the position coordinates transmitted by the Enchanter’s EPIRB. Meanwhile the ARHT helicopter departed from Ardmore Aerodrome in Auckland at 2252. The NEST helicopter arrived on scene at about 2340 and immediately detected two light sources. The first was a strobe light in the water. However, it was not attached to anything.
- The second light source was from the vessel’s EPIRB attached to the inverted flybridge, to which the skipper, first mate and one passenger were clinging. The helicopter crew conducted a risk assessment and then lowered a rescue swimmer to the water. The three survivors were then winched on board one-by-one, accompanied by the rescue swimmer.
- By now, New Zealand Police (NZ Police) had been briefed and had set up a forward command post at Te Hapua, the closest point to the search area with road access. At 0013 the NEST helicopter departed the scene and flew the three rescued survivors to Te Hapua, where they were transferred to ambulance staff. While in flight the helicopter crew learned from the survivors that: two people were last seen sitting on the inverted hull; three were in the water; one was in the water (but likely deceased); and one was unaccounted for (but was likely trapped in the inverted hull).
- The NEST helicopter returned immediately to the scene to resume the search. They detected another light source that proved to be from the two passengers on the inverted hull. One of the passengers had used the light from a mobile phone to attract their attention. They had earlier tried to make an emergency 111 call but were unsuccessful because of poor mobile coverage in the area. In a similar fashion to the first retrieval the two passengers were retrieved by 0108. The helicopter crew decided to fly these two survivors directly to Kaitaia Hospital as the helicopter was running low on fuel.
- Meanwhile, the ARHT helicopter had stopped at North Shore Aerodrome to pick up a more experienced winch operator, then at Dargaville to top up with fuel, and again at Kaitaia Hospital to top up with fuel from the NEST trailer before heading to the scene. The two helicopters passed each other in flight and exchanged information.
- The NEST helicopter landed at Kaitaia Hospital and transferred the two passengers to medical staff. The helicopter crew then refuelled from the fuel trailer. However, there was not enough fuel remaining to return to the scene, so that helicopter remained at Kaitaia Hospital.
- The ARHT helicopter arrived on scene at 0130 to begin the search for the five missing people. Meanwhile, the RCC had also tasked a Royal New Zealand Airforce P3 Orion aeroplane (P3) to assist in the search. The P3 arrived on scene at about the same time as the ARHT helicopter. The RCC assigned the P3 as on-scene coordinator circling at a higher altitude. The helicopter searched at a lower level in the dark for about an hour and 20 minutes before it too ran low on fuel and landed at the Te Hapua forward command post at 0257
- Meanwhile, a fuel tanker had been sourced at Kerikeri and was sent northwards, arriving at Kaitaia Hospital at 0511. The NEST helicopter was refuelled, but by then the helicopter crew had exceeded the limits of their work/rest operational hours, thus preventing them from rejoining the search effort. The fuel tanker then travelled north to Te Hapua forward command post, arriving there at about 0700. The ARHT helicopter refuelled and departed for the search area again at 0733. For 4 hours and 36 minutes there were no helicopter air assets able to search because no fuel was available.
- Meanwhile, several vessels had responded to the mayday relay calls. Another of the operator’s fishing charter vessels Pacific Invader had departed Mangōnui and arrived at the search area at 0400. A commercial fishing vessel Florence Nightingale, which had been out at the Three Kings Islands at the time of the accident, arrived soon after 0400. Another commercial fishing vessel Katrina arrived at the search area at about 0612. All three vessels were coordinated into a search pattern or directed to items of interest by the P3 circling above.
- At about 0710 (first light) the body of one of the passengers was located and recovered by one of the surface search vessels. When the refuelled ARHT helicopter had returned on scene, it took over as the on-scene coordinator from the P3, which was by then getting low on fuel. The bodies of another two passengers were recovered over the next 40 minutes, leaving two people still missing.
- Meanwhile, preparing for an extended search operation, the RCC had tasked a second rescue helicopter from AHRT. This second helicopter arrived at the forward command post at 0907 and relieved the first helicopter.
- When the mayday relays had been broadcast, the inshore patrol vessel HMNZS Taupo had been operating in the Hauraki Gulf. It diverted to the search area, arriving on scene at 1110. The RCC assigned HMNZS Taupo with the role of on-scene coordinator, tasked with ensuring all marine assets were searching the designated areas assigned by the RCC. However, the HMNZS Taupo misunderstood the meaning of on-scene coordinator and assumed the naval warfare role of on-scene command, effectively taking control of the search away from RCC.
- Over the following hours multiple assets joined the search including Coastguard Houhora, two other commercial helicopters from Kerikeri and another P3.
- At 1319 the body of a fourth passenger was located and recovered, leaving one passenger still missing. By 1527 the RCC had realised that air assets were not following their assigned search patterns. HMNZS Taupo had directed all assets to search another area, based on their own drift-modelling calculations. After some discussion with HMNZS Taupo, the RCC took back control of the search area.
- Meanwhile the RCC had tasked the NZ Police Dive Squad to fly up from Wellington to dive on the hull in anticipation of locating the final missing passenger. The Dive Squad arrived in the area by 1953 and prepared to dive at first light the following morning, 22 March 2022.
- By 2020 all assets on site had been stood down for the evening. HMNZS Taupo had marked the hull by attaching a rope with a white buoy earlier in the afternoon. The P3 recorded the GPS coordinates of the hull before leaving the scene.
- However, the following morning the inverted hull could not be located. A helicopter was tasked with searching for the upturned hull. At 1239 the hull was located and the vessel with the NZ Police Dive Squad on board was directed to that location. The body of the last missing passenger was recovered from the hull at 1654, marking the end of the search and rescue task.
Salvage
- In the days after the completion of the search and rescue task, the inverted hull of the Enchanter was taken under tow, as it was considered a danger to surface navigation. However, as soon as the tow began, the hull rolled back upright and then sank in about 24 metres water depth.
- The tow vessel then attempted to drag the hull across the seabed into deeper water (the wreck was considered to be at a depth where it would be a hazard to recreational divers). However, the manoeuvre was unsuccessful and, according to divers who were on board the tow vessel, the hull sustained significant damage when it was dragged into an underwater rocky outcrop. Survivors and search and rescue personnel described the bottom of the hull as being undamaged before it sank.
- On 31 March 2022, the sunken hull was raised to the surface and towed to a private launching ramp just inside the entrance to Houhora Harbour. The hull was grounded in the mud at high water. When the tide receded, the hull was winched through the mud to a point where the Commission was able to conduct a thorough inspection. (See Figure 5 and Appendix 4 for photographs taken during this inspection.)

- Neither the flybridge from which three survivors were rescued nor any of the structure that formed the main saloon and supported the flybridge was recovered.
- The suite of navigation equipment located on the flybridge was also lost. A second GPS located in the skipper’s cabin was retrieved. Despite having been submerged in salt water for several days, the Commission was able to extract data from the memory chip. However, the GPS was an older model, so the data was encrypted in a format that yielded no useful track coordinates.
Meteorological information
- The location of the accident off North Cape lay between two MetService forecast sea areas. The Three Kings Islands lay within the Kaipara forecast area and the destination anchorage behind Murimotu Island lay just within the Brett forecast sea area (see Figure 6).

- On the day of the accident the weather situation consisted of a low-pressure system, which was lying in the Tasman Sea to the west of North Island extending a series of fronts across Northland. There was a strong northeast flow ahead of these fronts (see Figure 7).
-
The forecast for the sea area Kaipara issued by MetService at 2248 on 19 March 2022 (the evening before the accident) was:
Sunday 20 March 2022
Northeast 25 knots, rising to 35 knots this morning, changing northerly 15 knots north of Kaipara Harbour this evening. Sea becoming very rough, easing in the north. Long period southwest swell 2 metres developing. Northeast swell rising to 2 metres in the north. Poor visibility in scattered rain, with possible thunderstorms.
Monday 21 March 2022
Becoming northerly 10 knots everywhere early, rising to 20 knots offshore late. Very rough sea in the south easing. Moderate southwest swell easing. Moderate northeast swell in the north.
-
The forecast for the sea area Brett issued by MetService at 2248 on 19 March 2022 (the evening before the accident) was:
Sunday 20 March 2022
Northeast 25 knots, rising to 30 knots early afternoon. Sea becoming very rough. Northeast swell rising to 2 metres. Poor visibility in rain with possible thunderstorms from afternoon.
Monday 21 March 2022
Becoming northerly 10 knots early. Very rough sea easing. Moderate northeast swell.

- The skipper had access to the MetService information, but primarily relied on the PredictWind subscription weather service, specifically the Global Forecast System (GFS). The skipper frequently monitored these resources and concluded that the weather forecast was suitable for the fishing charter trip to proceed.
- The skipper had previously discussed the weather forecast with the charter group organiser. They acknowledged the frontal system that was predicted to pass over Northland over-night on Saturday 19 March 2022 with associated strong winds and rain. They agreed they had various options available should the predicted adverse weather eventuate.
- The weather conditions for the first three days of the trip were as predicted: fine weather with low swell and little wind. The skipper frequently monitored the weather forecast as the trip progressed and kept the passengers well informed. On Saturday 19 March 2022 the skipper noted that the cold front associated with the low pressure in the Tasman Sea was still predicted to pass the Three Kings Islands from the northwest early on the morning of Sunday 20 March 2022. The skipper adjusted the plan. The Enchanter remained in the sheltered anchorage until mid-morning and then, as the front was still passing, they travelled to and fished in the lee of the Princes Islands.
- By 1330 the weather had cleared, the wind had backed (the wind direction changed or trended anticlockwise) to approximately north-northeast (blowing from about 25 degrees) direction and dropped to 15 to 20 knots. The Enchanter left the Princes Islands for the six-hour trip to North Cape, essentially following the weather system that had passed through.
- There are no wave-recording devices located in the sea area around North Cape and the Three Kings Islands. The survivors’ estimates of the wave conditions for the trip back were reasonably consistent: about 2.5 metres average at the start and easing to about 1.5 metres average as the Enchanter progressed towards North Cape. (See Appendix 1 for a description of wave formation and characteristics.)
- The seawater temperature round the North Cape area was about 22 degrees Celsius.
Vessel information
- In 1981 the Enchanter was designed initially as a14.2-metre motorsailer but before it was built the owner altered the design to a Class X commercial fishing vessel. The Enchanter was built as such in 1982. The vessel was built using fibreglass over double-diagonal kauri plank with a single-deck superstructure built in marine plywood (no flybridge).
- In 1984 the Enchanter was modified to be a passenger vessel, and it is thought that a semi-open flybridge was added on top of the main saloon at that time (records were hard copy at that time and not always complete).
- In 1993 the vessel was lengthened by two metres at the stern. The Enchanter was purchased by the current owner in 2004 (initially the vessel was purchased by the current owner as part of a partnership, before forming a company).
- In 2009 the vessel was resurveyed to allow it to operate further from the coast, within Coastal (Maritime Rules Part 20 Operating Limits, Section 20.2(a) Coastal Limits [50 nautical miles off the coastline]) and Restricted Offshore Limits (Maritime Rules Part 20 Operating Limits, Section 20.2(a) Offshore Limits [outside Coastal Limits out to 200 nautical miles off the coastline but restricted by the surveyor in this case to l00 nautical miles]). The flybridge was enclosed with glass windows and the helm station in the main saloon was removed, leaving the only control console located on the flybridge.
- The Enchanter had sleeping quarters for eight people in the cabin below and forward of the main saloon and for two crew in a cabin behind and below the main saloon.
- Propulsion was by twin diesel engines giving a service speed of about eight knots.
New Zealand search and rescue system
- New Zealand is responsible for one of the largest search and rescue (SAR) regions in the world, covering over 30 million square kilometres (see Figure 8).

- The coordination of SAR operations for the region is divided into two categories. Category I SAR operations are coordinated by NZ Police at a local level, covering searches within New Zealand on land, inland waterways and close-to-shore marine operations. Category II SAR operations are coordinated at a national level by the RCC. These operations typically involve missing aircraft, aircraft in distress and offshore marine operations within New Zealand’s SAR region.
- The New Zealand Search and Rescue Council (NZSAR Council) and the NZSAR Secretariat provide strategic oversight and governance for the SAR sector. The NZSAR Council comprises leaders from the Ministry of Transport, the Civil Aviation Authority, Fire and Emergency New Zealand, Maritime New Zealand, New Zealand Defence Force, NZ Police, Department of Conservation, as well as an independent member.
- The NZSAR Secretariat provides the NZSAR Council with advice and support services, as well as providing leadership to the sector by implementing measures to promote strategic coordination (see Figure 9).

- SAR coordinators are provided by NZ Police or the RCC depending on the category of the SAR operation. They can task several types of assets provided by several agencies and private operators. These include helicopters, fixed-wing aircraft, vessels, land vehicles and people. The majority of SAR personnel are volunteers. According to the NZSAR Annual Report 2021 the sector consists of 11,561 personnel, of which 91 per cent are volunteers (see Figure 10).

Assets
Helicopters
- For SAR operations, NZSAR coordinators can task helicopters from the New Zealand Defence Force, NZ Police and civilian operators.
- The initial responding helicopters tasked by the RCC to search for the Enchanter were medical service helicopters provided by NEST and ARHT. The helicopters are civilian operated and have operational agreements with the National Ambulance Sector Office (NASO) to serve as regional air ambulances.
- For operators to maintain their NASO agreement, they must meet the criteria outlined in the NZ Aeromedical and Air Rescue Standard. This document was created by NASO to enforce standardisation of aircraft, equipment and training among the different civilian operators to better serve the health sector.
- To better serve New Zealand, the NASO agreement allows for air ambulances to be used for the purposes of search and rescue when they are not being used for medical purposes.
- Other civilian operators may also be tasked for search and rescue operations depending on the needs of the operation and availability of aircraft. These assets may be lacking some of the equipment and/or personnel that come with a NASO aircraft, such as not being winch capable and/or not having paramedics onboard.
New Zealand Defence Force and NZ Police
- The RNZAF’s No. 3 Squadron is equipped with a fleet of eight NH-90 helicopters based at RNZAF Base Ohakea, Manawatu. The No. 3 Squadron always has one aircraft and crew on 24-hour standby and can be airborne within two hours of notification.
- NZ Police operate the Eagle fleet of three Bell 429 helicopters all based out of Auckland. They are used for a variety of NZ Police operations including search and rescue. However, their uses are limited by not being winch capable.
Fixed-wing aircraft
- The RNZAF maintained a fleet of P-3K2 Orion aircraft (No. 5 Squadron), and C-130 Hercules aircraft (No. 40 Squadron) both of which were long-range aircraft (at the time of publication of this report the P3-K2 had been replaced by the P-8A, a more modern similar-sized jet aircraft suited for long-range SAR operations). These large aircraft were essential in providing coverage for New Zealand’s broad search and rescue region extending from Antarctica to several Pacific islands. One aircraft was on 24-hour standby and could be airborne within two hours of notification.
- Coastguard New Zealand operates two small Cessna 182 aircraft, which are crewed by volunteers. These aircraft provide a visual search platform and are based in Auckland (Ardmore) and Northland (Kerikeri).
Vessels
- Coastguard New Zealand is a volunteer-based charity comprising 58 (at the time of the accident) units serving communities around the country. Coastguard New Zealand operate 107 vessels, the size and type of which varies between locations, but the average size is between 9 and 10 metres in length.
- The Royal New Zealand Navy (RNZN) maintains one vessel on 24-hour standby, which can be deployed within 12 hours of notification.
- NZ Police are equipped with two purpose-built response vessels, to aid in a variety of police work including search and rescue operations and NZ Police diver support. The vessels are crewed by police specially trained in maritime operations, are located in Auckland and Wellington and can be deployed on 24 hour’s notice.
RCC asset database
- The RCC maintains a countrywide database of all assets and their capabilities, which they use to make efficient decisions when tasking assets to SAR operations throughout the region.
Analysis Tātaritanga
Introduction
- The Enchanter’s hull was well-constructed and in an apparent good state of repair. There is no evidence of any mechanical or equipment failure that could have contributed to the accident.
- Although earlier on the day of the accident the sea conditions in the area had been adverse, the skipper had planned to seek shelter when required and judged the timing of the return trip to North Cape to coincide with the forecast and observed easing of the wind and sea conditions. The general sea conditions in the area off North Cape at the time of the accident should normally have been well within the capabilities of the vessel.
- The Enchanter was knocked down by a wave, resulting in the destruction of its main cabin and flybridge, and total capsize. The accident was initially survived by nine of the ten people on board, yet five people tragically died.
- The following section analyses the circumstances surrounding the accident to identify those factors that increased the likelihood of the event occurring. It also discusses factors that increased the severity of the outcome, such as the suitability and performance of survival equipment and the efficiency of the subsequent search and rescue response.
- Other non-contributory safety issues that have the potential to adversely affect future operations are also discussed.
What happened
- By the time the Enchanter was approaching North Cape the sea conditions there had moderated with the passing of a cold front over the area from the north. The wind had eased and backed towards the north. The sea conditions had eased to an estimated 1.5 to 2.0 metre waves.
- Almost three hours before the accident the sky had cleared, and sea conditions had eased sufficiently for the skipper to allow passengers to move around and open the side windows in the main cabin. The lures were also deployed around this time.
- The Enchanter was on automatic pilot for the trip to North Cape. The skipper was navigating from the flybridge, where the only helm and control console were located. The skipper was using a chart plotter to navigate. The chart plotter ran a ‘Time Zero’ (‘Time Zero’ is a manufacturer of navigation software) charting software program. In addition, the standalone radar and depth sounder were running. The skipper told the Commission there was a planned route displayed on the chart plotter from their departure point at the Princes Islands to the intended anchorage behind Murimotu Island via a series of waypoints, that, if followed, would have taken the Enchanter around Murimotu Island in deep water. The skipper described one of these waypoints (the ‘turn waypoint’) as being about 1.4 nautical miles off Murimotu Island (about 0.8 nautical miles outside the 10 metre depth contour), where the skipper intended to begin taking the Enchanter south. (See Figure 11 for a screenshot representing the skipper’s planned track, taken from another company-owned vessel.) The skipper said they were adjusting the autopilot to broadly follow this track. If the track was followed, they would have kept the vessel in about 50 metres water depth as the Enchanter closed with the coastline and reached the turn waypoint (as the GPS was not recovered, its exact coordinates are not known. The location of the planned waypoint was derived from the skipper’s description on the chart during interview). The skipper was aware that it was risky to pass too close to the coastline when sea conditions were adverse, particularly when the waves were from the northeast quarter.
- In their interview, the skipper indicated that before reaching the turn waypoint, they had begun adjusting the autopilot to change course to ”head down” (indicating to head south). The skipper later clarified that only one adjustment had been made on the autopilot to the south and that was to bring the Enchanter back on track to the turn waypoint. The skipper said that it was not their intention to begin altering course to round Murimotu Island until after the Enchanter had reached the turn waypoint. The skipper placed the location of the capsize at a point north-northeast of Murimotu Island, where the Enchanter was still on its planned route and before it reached the turn waypoint.

- In the period leading up to the capsize, the skipper had briefly walked to the rear of the flybridge to check on the trawls and then returned to the helm where the chart plotter was located. The skipper was seated there for an undetermined period. It was while seated there that the skipper noticed, in the fading light, the “wall of water” about to meet with the vessel from the port side. The time of the accident was approximately 1950, which was when the first mate had just looked at a mobile phone to view a text message.
- The Commission was not able to establish an accurate track for the Enchanter leading up to the accident. The main GPS and chart plotter were in the separated flybridge structure, which was not recovered. The Globalstar spot-tracking device that had been installed by the owner had a habit of dropping offline. It did not transmit position reports for most of the trip from the Princes Islands to North Cape, except for five occasions, the last two of which were at 1806 and 1906 (about 43 minutes before the accident).
- The second GPS unit retrieved from the skipper’s cabin during the salvage of the hull revealed no location data.
- The skipper advised the Commission that the accident happened north-northeast of the awash rock near Murimotu Island in about 50 metres depth of water. This was based on the skipper’s perception of where the vessel was, the observations of water depth using the echosounder, that they could see the gap between the mainland and Murimotu Island before and after the capsize, and the estimated time of arrival at the anchorage.
- The Commission has reached a different conclusion from the skipper as to the location of the accident. The Commission bases its view on an analysis of the EPIRB data, and drift modelling conducted by the RCC (refer to paragraphs 3.23 and 3.24).
- The Commission acknowledges that the skipper and first mate recall seeing the gap between Murimotu island and the mainland both before and after the accident. These recollections could give a broad indication of orientation; however, they do not give an indication of distance from the land. The profile of the gap between the island and mainland (the outline in the fading light) would be visible across a broad area including the Commission’s calculated area of capsize (see Figure 12), but that profile would alter when viewed from different locations as the flybridge drifted north.
The EPIRB data
- The Commission engaged an expert in EPIRB data analysis and functionality to explain the various forms of location data that the Enchanter’s EPIRB transmitted. See Appendix 5 for the expert report containing a detailed description of the EPIRB data.
- The location data received at the RCC from the EPIRB was a combination of three data sources: firstly, medium-altitude earth orbiting search and rescue (MEOSAR) satellite data; secondly, the encoded Global Navigation Satellite System (GNSS) location data from the internal GPS; and thirdly, location data from an internal AIS, all transmitted directly from the EPIRB. The MEOSAR data is based on satellites receiving the generic 406/121.5-megahertz signal transmitted by the EPIRB. This signal will provide an initial alert to an EPIRB activation followed by an initial location, but its accuracy is limited. The accuracy of the MEOSAR location improves with time and the number of satellites passing overhead. For GPS-enabled EPIRBs (such as the one installed on the Enchanter) an internal GPS provides an encoded position that is transmitted to the satellite, providing RCC with an accurate location of the EPIRB to within an area of certainty of plus or minus two seconds of latitude and longitude. This means the GNSS coordinates provided identify a central position within a rectangle measuring 123 metres north to south, and 102 metres east to west. The EPIRB can be located anywhere within the rectangle at the time of transmission. This area of certainty is demonstrated in Figure 12 where each encoded position is centred within a green rectangle. Approximately 30 minutes after capsize, the first encoded GNSS GPS position transmitted by the EPIRB placed the Enchanter’s flybridge within 620 metres (inclusive of the area of certainty) of Murimotu Island at position S34 24.864’, E173 03.534’. The estimated area of capsize provided by the skipper was approximately 0.91-1.0 nautical miles east-northeast of this position (see Figure 12).
- After the EPIRB had surfaced, the first mate made several attempts to manually activate the EPIRB in the dark, before successfully activating it between 2015 and 2016 (time of activation is based on data received by the RCC. According to the EPIRB manufacturer, an EPIRB is expected to transmit at approximately 50 seconds after activation). After it was activated, it was tied to the floating flybridge. The RCC received the first MEOSAR beacon alert at 2017 and the first transmission of the beacon’s encoded GPS position at 2020. In Figure 12 the green track shows the encoded positions of the EPIRB, and thus the location and drift direction of the flybridge, which the skipper, first mate and one passenger were sitting atop.
- The accuracy of the encoded GPS positions transmitted by the EPIRB is also confirmed by comparing it with the TracPlus flight data (the TracPlus flight data is included in Appendix 6) from the first responding rescue helicopter. During the initial rescue of the three surviving passengers on top of the flybridge, the flight data shows the rescue helicopter hovering in close vicinity to the encoded position transmitted by the EPIRB at the same time.
- Rescue helicopters are equipped with a homing device that helps locate an activated EPIRB in the event the position is not known. On the evening of 20 March 2022, the NEST rescue helicopter crew did not use their homing device. They flew to the flybridge using the encoded GPS position transmitted by the EPIRB, which was provided to them by RCC, and visually identified the EPIRB by its flashing strobe light. This demonstrates that the encoded GPS position transmitted by the EPIRB was accurate, as it led the helicopter directly to the scene.
- The red dotted line in Figure 12 represents the skipper’s estimate of the Enchanter’s track and the red shaded area represents the area where the skipper estimated the accident occurred.
- Figure 13 is an enlarged portion of Figure 12, showing the individual times and GPS positions for successive EPIRB encoded GNSS transmissions to the RCC. Figure 13 uses a chart from the Navionics charting software (navionics product-SonarChartTM collects sonar log data recorded from users operating in the area to keep charts updated), which shows depth contours in more detail.


Location of capsize
- During the SAR operation the RCC was using drift-modelling software to help coordinate the search effort to the most likely area (The current data is obtained via an Environmental Data Server (based at the RPS group in Australia) that receives data from various sources globally. The data shown in this model was sourced from MetOceans Solutions and incorporates the MetOcean drift current forecasting with an underlying RPS tidal model. It is the most accurate hydrodynamic current model available for coastal New Zealand within the SARMAP system). The drift modelling calculated the net drift to be northward at the time and the location of the accident, mainly influenced by the tide. High water at North Cape occurred at 2234. With the pending change in tide, by 2130 (70 minutes after the EPIRB activation) the calculated drift pattern turned to become easterly (see Figure 14).
- Objects in the water will drift in different directions depending on their characteristics. A lightweight object floating on the surface is more likely to be influenced by the wind and surface wave action, whereas objects floating deeper in the water will more likely be influenced by the tide and current. This phenomenon was observed during the SAR operation. The hull of the upturned vessel drifted more in a southerly direction. What is thought to have been a strobe light attached to a lifebuoy appeared to the survivors, relative to their own drift rate, to be drifting closer to the shoreline under the influence of the wind. The drift rate of the mostly submerged flybridge was accurately tracked by the EPIRB that was attached to it. The RCC drift modelling is consistent with the observed track of the EPIRB once it had been activated, which was initially northward and then turned east.
- Using the encoded positions transmitted by the EPIRB, the initial drift of the flybridge was northward at about 0.14 knots. Taking into consideration the encoded positions area of certainty, as shown by the green rectangles in Figure 12, the EPIRB’s rate of drift was between about 0.06 to 0.17 knots.


- When considering all the factors that could affect the drift of the flybridge, the Commission concluded it was about as likely as not that its rate and direction of drift after the EPIRB had been activated was similar to the 30 minutes prior to the EPIRB being activated (noting the EPIRB was attached to the flybridge). Therefore, it is about as likely as not that the location of the capsize would have been within an area about 0.07 nautical miles (about 130 metres) south of the first encoded position, as shown in Figure 12.
- Both the first GNSS position transmitted by the EPIRB and this calculated area of capsize were within the 10 metre depth contour as shown in Figure 13.
- These shallower water depths correlate more closely with the description of the wave that caused the Enchanter to capsize. This is discussed in more detail in the following section on weather and wave theory.
- As stated previously, the skipper’s estimate of capsize location is approximately 0.91 to 1 nautical mile from where the EPIRB was activated. While this scenario was considered, the mostly submerged flybridge would need to have travelled that distance in 30 minutes, being driven by the current at an average rate of 1.8 to 2 knots in an opposing direction to the drift modelling provided by the RCC as well as the drift of the EPIRB post activation. The Commission considers this unlikely given the local conditions at the time of the accident.
- The skipper’s estimated location of capsize is in a similar location to where the flybridge was located by the NEST rescue helicopter using the EPIRB’s encoded position, four hours later. For the skipper’s capsize location to be correct, there would have had to have either been little to no drift in the four-hour period between the capsize and rescue, or the direction of drift would have had to reverse after the EPIRB was activated, taking the flybridge back out to where the skipper estimated the capsize occurred. Neither hypothesis is consistent with the RCC drift modelling, which broadly correlated with the observed track of the EPIRB after it had been activated.
- Weather systems can affect local conditions such as the direction and velocity of surface currents. The underwater topography can add a level of complexity to the various tides and currents if near shore. These factors add an element of uncertainty to any backdrift analysis. Reliable data sources recording such local conditions at North Cape do not exist. Therefore, to determine the approximate drift rate of the flybridge after EPIRB activation and the area of capsize, the Commission has used time and distance calculations based on the only reliable data available, the EPIRB transmissions, as these transmissions most accurately reflect the approximate drift rate of the flybridge after EPIRB activation.
- Given the distance between the position of the EPIRB activation and the estimated capsize position provided by the skipper, the storm system would have needed to produce a current in excess of 2 knots opposing the predicted northern tidal flow, which is not supported by the initial drift pattern of the EPIRB.
- The Commission has not been able to establish the reason for the disparity between where the skipper estimated the capsize happened in deep water, and where the encoded EPIRB data indicates the capsize occurred inshore in shallower water.
Weather and wave theory
- The forecast for the sea area Brett (see Figure 6) for Sunday 20 March 2022 was for rough seas and a northeast swell rising to 2 metres ahead of a frontal weather system passing over the area from the North. The only actual recordings of the sea state in the general area were from two waverider buoys. One was a wave spotter buoy which had been drifting above North Cape from 17 to 24 March 2022. The other was a Northland Regional Council waverider buoy located off the Purerua Peninsular near the Bay of Islands, some 70 nautical miles southeast of North Cape and some 120 nautical miles southeast of the Three Kings Islands. The data from the Northland Regional Council waverider buoy is considered more representative of the general conditions off Murimotu Island as it was not affected by the weather pattern off the west coast of North Island.
- On the day of the accident the wave spotter buoy had generally drifted in a westerly direction. At 1420 the buoy was located approximately 15 nautical miles northwest of Murimotu Island, recording a peak significant wave height of 4.2 metres with a period of about 8 seconds. By 1910 the buoy had drifted west to within 3 nautical miles of Cape Reinga recording significant wave heights of 3.2 metres, broadly demonstrating that conditions had started to ease during the Enchanter’s voyage to North Cape.
- The Northland Regional Council waverider buoy recorded a peak in significant combined (wind and swell) wave height of about 4 metres with an average period of 7 seconds (the wave period created by this weather system, in deep water, is unlikely to change significantly over the 70 nautical miles between the waverider buoy and the accident area) between 1300 and 1400 on the day of the accident. The maximum recorded wave height for the same period was about 6 metres. These peaks coincide with the passing of the same frontal system that had passed over the Three Kings Islands earlier that morning. They also coincided with the time that the Enchanter departed the Three Kings Islands. By 2000 (about the time of the accident) the significant wave height off the Bay of Islands had fallen to 2.7 metres, with a maximum wave height of 4.3 metres. The wave height at North Cape had likely decreased more, being 70 nautical miles further northwest of the weather system.
- Observers noted the presence of a smaller secondary swell coming from a southeast direction (head-on to the Enchanter’s direction). This secondary swell was considered much smaller than the main waves coming from the northeast sector. Waves from different directions can combine to form larger peaks and troughs.
- Survivors from the Enchanter estimated the main wave heights were in the range of 1.5 to 2 metres (these observations are likely based on what they were seeing, rather than a significant wave height) off North Cape at the time of the accident. These estimates broadly correlate with the wave heights recorded off the Bay of Islands as the frontal system moved further south and the winds eased.
- For a significant wave height of 2 metres in deep water, mariners can expect at least one in every 3,000 waves (or 3 every 24 hours) to reach 4 metres, twice the significant wave height (see Appendix 1 for more detail on wave formation and characteristics). In deep water a wave of this size should not pose a threat to a vessel of the Enchanter’s size, construction and stability.
- The amount of energy a wave possesses is representative of its height and length. If a wave enters shallow water, its wavelength decreases with a consequential increase in height while maintaining the same energy. When waves reach water depths less than half of their wavelength, they interact with the seabed, causing them to slow, rise and steepen (referred to as peaking). The waves eventually break as the water depth decreases further to about 1/20th of its wavelength.
- Therefore, waves with a longer wavelength will interact with the seabed earlier, than those with a shorter wavelength. Within a spectrum the waves will vary in height and length and thus energy. The average period of the waves recorded on the waverider buoy was about 7 seconds. For normal deep-water waves with a 7-second period their wavelength is calculated to be about 76 metres. Such waves would begin to interact with the seabed and start to peak at a depth of 38 metres. The shallower the water gets, the more they will peak until they begin to break at a water depth of about 4 metres.
- Only one survivor saw the wave approaching and was able to give a detailed description of the wave that capsized the Enchanter. That survivor was a passenger sitting out on the aft fishing deck observing the trawling lures at the time. That passenger described seeing a ‘larger wave’ approaching from the port side from the same direction as the prevailing swell. This wave’s form did not initially cause concern, but then as the wave neared the vessel it appeared to rise into a near-vertical wall. This observation is consistent with a wave peaking as it enters shallow water.
- The underwater topography off Murimotu Island matches the wave performance observed by the passenger. From seaward, the seabed off Murimotu Island slopes steeply from 50 to 10 metres water depth over 0.7 nautical miles (1300 metres). The seabed slopes very steeply from 30 to 2 metres water depth (see Figure 15). To the observer on the Enchanter’s aft deck a larger wave would have begun visibly peaking in the distance, with a sharp rise when the wave met with the 10-metre contour.
- This analysis of the wave form supports the hypothesis founded on the EPIRB data, that the capsize occurred much closer inshore and in shallower water than estimated by the skipper.
- Consideration was given by the Commission to whether the formation of what has been referred to as a ‘rogue wave’ was a factor in the capsize. In recent decades scientists have accepted the concept of rogue waves. The United States National Oceanic and Atmospheric Administration refers to rogue waves as those that are large, unexpected and dangerous; are nominally greater than twice the significant wave height; are very unpredictable; and often come from directions other than the prevailing wind and waves (https://oceanservice.noaa.gov/facts/roguewaves.html). Because these waves are uncommon, measurement and analysis of this phenomenon is rare (Appendix 1 contains further information relating to rogue waves).
- As mentioned above, a wave within the spectrum of the significant wave height present off North Cape could, in less than 10 metre water depth, cause the capsize and damage that occurred to the Enchanter. So too would an even larger wave. Therefore, determining whether the wave that capsized the Enchanter was within or higher than the spectrum of significant wave height in the area is of little relevance because either could have caused the vessel to capsize in less than 10 metre water depth.
- Regardless of where and how the vessel capsized, this accident raises significant safety issues about preparing for and increasing chances of surviving such an accident. We discuss these safety issues in the following sections.

Vessel stability and construction
-
When a vessel is knocked down by a wave and capsizes, its stability and construction are factors to consider. The Enchanter was resurveyed for restricted offshore limits in 2009. Then it underwent an inclining experiment and stability assessment to ensure it complied with the requirements of Maritime Rules Part 40C (Maritime Rules Part 40C – Design, Construction and Equipment – Non-passenger Ships that are not SOLAS Ships -Section 1, 13(1)). The Enchanter’s stability characteristics well exceeded the minimum requirements of Rules Part 40C. However, compliance with Rules Part 40C is no guarantee against a vessel capsizing. The Enchanter’s stability manual included the following warning to the master:
Safety Information – Compliance with stability and freeboard criteria required under Maritime Rule[s] 40C does not ensure avoidance of capsizing regardless of the circumstances. It is the master’s responsibility to execute prudence and good seamanship with due regard to weather forecasts, navigation zone, speed, headings, load distribution and watertight integrity, so the vessel is operating in the safest mode possible against the prevailing conditions at all times.
- The stability analysis process involved modelling the form of the hull’s watertight boundary and calculating certain criteria for comparison with those required under Rules Part 40C. The watertight boundary included the spaces below the Enchanter’s main deck and the raised foredeck (see Figure 16). It did not include the superstructure, comprising the main saloon, galley and flybridge.

- The modelled boundary was not watertight in the true sense of the word. Inside the main saloon there were openings leading to the sleeping quarters under the foredeck, the engine room, and the crew’s accommodation aft, all of which would allow down-flooding to occur should water enter the main saloon or, as in this instance, if the entire superstructure was lost when the vessel was knocked down.
- The naval architect conducting the stability analysis explained that the basis for considering the hull as watertight was that these openings would remain above the waterline when the vessel was heeled to its maximum angle before losing positive stability. The three main openings through which down-flooding could occur were all located around the centreline of the vessel and were calculated to be well above the waterline if the vessel were floating on its side (see Figure 17).
- Statical stability is the ability of a vessel to return upright after removal of an external factor which caused the vessel to heel (in static or calm water). The Enchanter, when loaded as it typically would be nearing the end of a voyage, could heel over to an angle of about 77 degrees before it lost positive stability (often referred to as the point of vanishing stability). At this point the risk of capsize would be high, based on statical stability (if the vessel were very slowly pushed over to 77 degrees). However, a vessel’s ability to return upright when heeled by wind and/or waves at large angles of heel is not linear – it changes as the vessel progressively rolls. Therefore, a vessel’s dynamic stability is also assessed as part of the stability analysis. Dynamic stability in this context is the vessel’s overall resistance to being pushed over in response to waves and reaching that point of vanishing stability (see Appendix 2 for more detail on stability).
- A vessel with low dynamic stability is easily rolled past the point where it loses stability. A vessel with high dynamic stability will take a lot more wave energy to reach that point. The Enchanter had relatively high dynamic stability, easily exceeding the minimum requirements of Rules Part 40C.

- From the survivors’ accounts the Enchanter’s final roll to starboard was rapid. The wave that struck the vessel had sufficient energy to roll the vessel immediately on to its side with sufficient force to implode the windows and structure forming the main saloon. Wave energy of this magnitude is generated as much from the wave’s steepness and profile as its size.
- The Enchanter’s superstructure appears to have offered little resistance to the capsizing energy of the wave. Within seconds the entire superstructure separated from the hull. This allowed water to down-flood into the ‘watertight’ hull through the internal openings, thus contributing to the total capsize.
- The flybridge separated from what had been the supporting structure beneath it – the four bulkheads of the main saloon including all windows. The flybridge was discovered floating upside down close to the capsized hull. It was this structure that three of the survivors climbed onto, from which they were later rescued (see Figure 18).

- Post-salvage inspection confirmed that the separation of the superstructure from the hull was not because of poor maintenance. The timber around this connection was in good condition and the method of connection was generally in accordance with the standards of wooden boat building for the era of build. The wooden material had failed from simple overload. Figure 19 shows the Enchanter after it had been salvaged. Note the total absence of the main superstructure (see Appendix 4 for details of the post-salvage inspection).

- We now consider whether the outcome would have been different if the superstructure had been strong enough to withstand the initial knock down by the wave. If the superstructure had remained intact, it is about as likely as not that the vessel would not have capsized immediately. With the vessel floating on its side, part of the superstructure would have provided buoyancy and thus contributed to the dynamic stability of the vessel (see Figure 17). It is not possible to say definitively whether it would still have eventually capsized. That would depend on whether the vessel righted itself with successive waves and what openings there were in the superstructure to allow seawater to invade the saloon space – for example, open windows and the main rear door.
- Nine of the ten people on board escaped to the water alive. It is likely that the person trapped in the forward sleeping quarters would have had a better chance of survival if the superstructure had remained intact. If the vessel had remained floating upright or on its side, the chance of survivors having access to the various life-saving aids would have been significantly improved. Three people who were known to have survived the initial capsize were later found deceased. Survivability was likely affected by swim failure. Having access to life jackets or a life raft would have reduced the onset of swim failure.
- It would not be practicable to require superstructures on all vessels be able to withstand the vessel being knocked down by a wave. A vessel is built to a certain specification for a particular purpose. Its intended purpose will determine its design and what standards it must meet, if any. Some are built as recreational vessels, in which case their design is often specified by the owner. Some are built to a standard hull design, but the superstructure and fitout is varied at the owner’s request. Others (for example, a tug) are designed for a specific purpose.
- Vessels often change ownership several times during their life and consequently their purpose often changes. Commercial vessels are required to be surveyed. If their purpose changes, they must undergo a survey to determine whether they are fit for their new intended purpose.
- The variation in vessel design and purpose is therefore infinite. It would not be practicable to have one standard applicable to all vessels.
- The Enchanter’s purpose changed several times over the life of the vessel. Each time it was resurveyed and deemed fit for that purpose. The Enchanter was originally built for a private owner to a standard Haag design and method of construction. It was initially designed as a motorsailer, then a Class IV launch, and ultimately was built as a Class X fishing vessel (these classifications refer to the standards applicable at that time). Two years later in 1984 it was modified to carry passengers. Nine years later in 1993 the Enchanter was lengthened by two metres. It changed ownership several times (exactly how many is undetermined). It was in commercial operation as a charter sport-fishing vessel when the current owner purchased the vessel in 2004. Under its current ownership it was resurveyed, enabling it to operate further offshore. The changes required to achieve these new limits – an upgrade to the equipment to be carried and a stability assessment – mainly related to how far from assistance it could be if an incident occurred.
- Charter sport-fishing vessels are not required to withstand a knock down or capsize but are required to have adequate stability to reduce the likelihood of such an occurrence. Ocean-going yachts on the other hand are usually designed with minimal superstructure which is stronger and can easily be made watertight as they are more susceptible to being knocked down by wind alone. The Enchanter had been repurposed to accommodate passengers on multi-day fishing charters. Its survival relied on its inherent stability and being operated at appropriate times and places, in suitable weather conditions and in an appropriate manner, as emphasised by the note to masters in the vessel’s stability manual.
- In that context, the skipper had taken shelter until the adverse weather system had passed over the area. The residual sea conditions for the trip from the Three Kings Islands to North Cape should have been within the Enchanter’s capabilities. However, the vessel’s stability and structural resilience would have been tested under the prevailing conditions if operated in shallower waters where steep breaking waves were more likely to occur and capsize the vessel.
- Under similar circumstances a more modern vessel of the same design and built from contemporary materials would be less likely to suffer the same degree of destruction. However, that does not assume the Enchanter was not fit for its intended purpose, provided it was operated in accordance with its Marine Transport Operators Plan. A vessel’s survival is never reliant on the quality of its design and build alone, nor only on the way it is operated. It will always be a combination of both.
Survivability
Safety Issue: Maritime New Zealand’s system for auditing and assessing the performance of accredited vessel surveyors is not ensuring they are interpreting and applying maritime rules correctly when surveying vessels.
- The Enchanter carried on board a variety of life-saving apparatus for the purpose of reducing the consequences of an accident by improving survivability. The purpose of each apparatus falls into three broad categories:
- to aid in people’s survival if they are required to abandon the vessel or the vessel is lost through a catastrophic event
- to alert potential responders to the event
- to assist responders in locating and rescuing the people.
- The Enchanter was required to meet the standards set out in Rules Part 40C for non-passenger vessels that do not have to comply with SOLAS standards. Appendix 3 of Rules Part 40C outlines the required standards for life-saving equipment onboard.
Life jackets
Safety Issue: New Zealand maritime rules do not adequately address the need for proper stowage of life jackets on board passenger vessels so that passengers have access to a life jacket in the event of a sudden catastrophic event.
- Regardless of what other life-saving apparatus is carried on board, people will inevitably spend time in the water if a vessel is lost or abandoned. Life jackets (variously referred to as buoyancy aids, life preservers and personal flotation devices, depending on their type and use) are fundamental to survival in the water. As well as providing flotation, the type of life jacket provided on the Enchanter was designed to aid detection by searchers through their bright orange colour, reflective tape, whistle and a self-activating light. Life jackets reduce the onset of swim failure by supporting the person in the water. They also slow any onset of hypothermia by allowing the wearer to ‘huddle’ instead of swimming, thereby reducing the loss of body heat.
- The Enchanter had life jackets on board for 30 people (the vessel was approved to carry 28 passengers when operating within Inshore Limits). All 30 life jackets were stowed under the bunks in the forward passenger cabin. When the sudden capsize occurred nobody had time to access the life jackets. Consequently, none of the nine people who initially survived the capsize was wearing a life jacket.
- Of the five people who lost their lives, one is thought to have died almost immediately in the cabin and another soon after entering the water. For the remaining three it is not possible to determine how long they survived before succumbing. One chanced on a lifebuoy and was later found deceased still wearing it. Little is known about the remaining two. All passengers and crew sustained injuries of some degree during the initial knock down and escape from the hull. Some of the injuries to those who lost their lives would have hampered their ability to swim. Some had pre-existing medical conditions that could also have hampered their ability to survive unassisted in the water. Both factors likely contributed to earlier swim failure, something a life jacket would have helped to prevent.
- Standard offshore life jackets are bulky. Storage on board smaller vessels capable of carrying many people is problematic. However, operators should make all efforts to spread the life jackets across several locations to increase the likelihood of people accessing them when needed. On the Enchanter, no more than 10 people could be carried on coastal and offshore trips. Ten life jackets could have been stowed in more accessible locations around the vessel. This would have been a reasonable way to manage the foreseeable risk of a sudden event. The Commission has made a recommendation to the Director of Maritime New Zealand to address this safety issue.
- Having access to a life jacket is important; so too is being able to put it on quickly in an emergency. The Enchanter’s passengers were told the location of the life jackets during a safety briefing before departing Mangōnui. However, they were not shown what one looked like and did not practise putting one on. The method of putting on and securing life jackets differs between types and manufacturers and not everyone is familiar with the practice. In an emergency and in the dark is not the time to be acquiring these skills. Although there was no opportunity to access life jackets on this occasion, there may well be under different circumstances, particularly if they are made more readily accessible. Skippers ensuring that passengers are familiar with and practised at putting on a life jacket is a key safety lesson arising from this inquiry.
- Not directly relevant to this accident, but important nevertheless, is the issue of when people should wear a life jacket or other personal flotation devices. Under normal circumstances it wouldn’t be considered necessary to wear one when occupying the internal spaces of a vessel of the Enchanter’s size and construction.
- However, it is evident that on these coastal and offshore charters, fishing for large species occurs on the open deck when conditions are not calm. The risk of someone falling overboard deserves consideration. SOLAS life jackets would not be suitable for this type of activity due to their bulk and the risk of them becoming damaged. However, fully compliant inflatable life jackets are available that would not compromise the activity. On the Enchanter there was no requirement to wear a life jacket of any sort when on the open deck, and none were supplied by the skipper. Lifebuoys were available on either side of the Enchanter to throw to someone who may have fallen overboard. However, these take time to deploy and there is no guarantee that they will reach a non-swimmer in the water in time, particularly if the vessel is trawling at the time. While not a maritime rule requirement, skippers should consider having and enforcing a policy that covers when passengers must wear a life jacket and should make them available.
Life rafts
- Life rafts too are important for survival. They offer a more effective solution than life jackets, particularly in situations where the time before rescue may be longer. Life rafts offer a sheltered haven free from immersion in water, all but negating the risk of swim failure and hypothermia.
- It is uncertain what happened to the Enchanter’s life rafts. They were not recovered and there is no evidence of them having deployed. There were two life rafts secured by a hydrostatic release to the aft deck of the flybridge. The deck of the flybridge was the platform to which three of the survivors were clinging when rescued. This flybridge structure was also not recovered.
- The hydrostatic release is designed to activate and release the life rafts if they reach a water depth of between 1.5 and 4 metres. If the vessel were to sink, the life rafts would release, float to the surface and inflate. However, the flybridge broke free from the hull and remained afloat. It is feasible that the life rafts never reached water depths of more than 1.5 metres during the capsize sequence and thus remained attached to the underside of the platform that the survivors were clinging to. If that was the case the survivors could have, in hindsight, reached under and manually released the life rafts.
- Because the vessel was classed to operate in Coastal and Restricted Offshore limits, maritime rules (Maritime Rules Part 42A-Safety Equipment – Life Saving Appliances) required that the two life rafts on board the Enchanter be SOLAS-type rafts. However, survey records show that both life rafts were of the non-SOLAS type (see Figure 20). This non-compliance had gone undetected by successive surveyors for several years. Although not directly relevant to this accident (because the life rafts were never deployed), the non-compliance is of concern. The difference between SOLAS and non-SOLAS life rafts relates mainly to the way they are constructed, the amount of insulation from temperature extremes the rafts must provide, and equipment available for longer-range SAR assets to detect the raft.
- The Commission has made a recommendation to the Director of Maritime New Zealand to implement a formal system of notifying surveyors of current and emerging changes to maritime rules for the construction, maintenance and surveying of vessels, and provide clarification where needed of the intent and application of maritime rules.

Lifebuoys
- Like life jackets, lifebuoys serve two purposes: they provide flotation and aid detection by searchers through their bright orange colour, retro-reflective tape and, in some cases, a self-activating light. They should be fitted with a grabline to aid retrieval and to facilitate support for more than one person. Some are fitted with a buoyant line to enable them to be secured to other floating items or to enable someone to be pulled towards a vessel in the case of a person overboard.
- The Enchanter was equipped with four lifebuoys. One was located either side of the flybridge, and the other two on top of the flybridge roof (see Figure 21).
- According to Appendix 3 of Rules Part 40C (Maritime Rules Part 40C, Appendix 3, Section 3.2 – Lifebuoys), all four were required to be fitted with a grabline. Two were required to be fitted with a self-igniting strobe light and two with an additional length of buoyant line.
- Section 52(2) of Rules Part 40C requires all life-saving appliances to meet the performance standards prescribed in Maritime Rules Part 42A (Rules Part 42A) (Maritime Rules Part 42A: Safety Equipment – Life-Saving Appliances – Performance, Maintenance and Servicing). Section 4 of Rules Part 42A – General requirements for life-saving appliances states that any life-saving appliance must meet the requirements set out in paragraphs 1.2.2.1 to 1.2.2.8 and paragraph 1.2.2.10 of section 1.2 of the International Life-Saving Appliance Code (Code adopted by the Maritime Safety Committee of the International Maritime Organization in Resolution MSC.48(66)). Section 1.2.2.7 required all life-saving appliances be fitted with retro-reflective tape where it will assist in detection and in accordance with the recommendations of the IMO.
- All four lifebuoys on the Enchanter were therefore required to be fitted with retro-reflective tape.
- The two lifebuoys fitted either side of the flybridge had self-igniting strobe lights and all four had additional buoyant lines. However, possibly only one was fitted with a grab line, two did not have retro-reflective tape and two had the remnants of retro-reflective tape that was so deteriorated as to be ineffective (Source – survey records and video from search and rescue aircraft). As with the non-compliant life rafts, these non-compliances had gone undetected by successive surveyors for several years. While this omission alone cannot be considered evidence of a wider issue with the standard of surveying, the Commission has made a recommendation to Maritime New Zealand to ensure it has an adequate system for monitoring the standards of marine surveying. Retro-reflective tape is an important feature of life-saving equipment. It aids in the detection of survival equipment and people in water, particularly at night.
- Shortly after the Enchanter capsized, survivors noted one of the passengers in the water with a lifebuoy. The passenger had placed the lifebuoy over their head and under their arm pits. After the five survivors had been rescued from atop the hull and flybridge, the second helicopter on scene searched the area in the dark without success for an hour and 25 minutes until it ran short of fuel and returned to the forward command post. The same passenger was found shortly after sunrise when, after refueling, the helicopter resumed on task 4.7 hours later. The passenger was found deceased but still in the lifebuoy.
- Rescue personel who recovered the passenger from the lifebuoy noted its poor condition, having no retro-reflective tape. The air crew commented on how retro-reflective tape stands out “like a beacon” when using night-vision goggles, even without direct contact from a search light.
- It cannot be said for certain that the people in the water would have been detected during the helicopter night search before they succumbed. However, their chances of detection would have been significantly better had the various life-saving apparatus been available and been appropriately fitted with the required light sources and retro-reflective tape.

Emergency Position-Indicating Radio Beacon (EPIRB)
- An EPIRB is critical for quickly and accurately alerting authorities to an emergency situation. They come in a variety of sizes and forms. There were two EPIRBs on the Enchanter. The main unit was required to be float-free and automatically activate if submerged. It was an upgrade requirement when the Enchanter was resurveyed for limited offshore operations. The owner had kept the original EPIRB on board as a backup to the main one. This older unit was stowed on a bracket in the main saloon. It was not of the float-free type and had to be manually activated. This backup EPIRB was lost together with the debris of the main saloon.
- The main EPIRB was the unit that fortuitously surfaced next to the skipper soon after escaping the inverted flybridge. It had been stored in its float-free enclosure next to the float-free life rafts at the rear of the flybridge. Like the life rafts it was designed to release from its enclosure and float to the surface when submerged to a depth between 1.5 and 4 metres (see Figure 22)
- The life rafts did not float free, but the EPIRB did. However, after it had floated free, the EPIRB did not activate automatically as designed. The EPIRB manufacturer was unable to explain why it did not automatically activate, other than the possibility of a fault in the switching mechanism. They report that they had no record of the switch having failed previously. Once the EPIRB was manually switched on it performed as designed. The fact that it did not automatically activate is of concern. Had it not surfaced right next to the skipper, it may never have activated, which would have significantly delayed the start of the search and rescue response.

- The failure of the EPIRB to automatically activate highlights the importance of having multiple means of raising the alarm and for authorities to have access to a vessel’s track history if it is reported overdue. As said, EPIRBs come in a variety of types and sizes. Personal locator beacons can provide a useful backup to other alerting systems. They are relatively inexpensive and small enough to fit in a pocket. While not as robust as the larger commercial type-approved EPIRBs, they may well save lives following a rapid and catastrophic event in which the commercial systems prove ineffective in the circumstances, such as the Enchanter accident (safety lesson).
Vessel-tracking systems
Safety issue: There is no requirement for commercial vessels that carry passengers to be fitted with any form of tracking device such as an automatic identification system (AIS) or other commercially available tracking systems.
- The owner of Enchanter Fishing Charters had installed the Globalstar spot-tracking device on all three of its vessels. The system was primarily to allow the owner/skipper’s partner at the shore base to track where the three vessels were. The system worked most of the time, but the transmitter unit on the Enchanter did drop offline from time to time and required resetting. Consequently, the system was of little use to the RCC when coordinating the search and rescue. Had the main EPIRB been lost and not manually activated by the survivors, the Enchanter's plight may not have been truly understood for several hours. It would have taken longer for a search and rescue effort to begin based only on the Enchanter’s missed check call with Far North Radio.
- An AIS uses transponders to transmit real-time data about a vessel’s identity, position and movement, either directly from the vessel to another VHF transceiver or via satellite. This data is recorded and can be retrieved by the RCC to help establish a vessel’s position and status or, as in this case, the last known position.
- The system was initially introduced worldwide to assist in collision avoidance but its worth as a search and rescue tool and a marine traffic control system was soon realised and these have become its primary uses over time. Currently, only international SOLAS ships and certain classes of domestic ships are required to be fitted with AIS. Currently, vessels such as the Enchanter are not required to have it fitted.
- In the Commission’s view there is significant benefit in requiring certain classes (like passenger-carrying vessels) to be fitted with AIS. The safety benefits are likely to far outweigh the minimal cost. Using the Enchanter case as an example, if an EPIRB had not been activated and the system was reliant on an overdue check call to raise the alarm, retrieving the AIS data for the Enchanter (had one been fitted) would have led searchers directly to where the signal was lost, which would be where the capsize occurred.
- In 2015 the Commission published the Technologies to Track and to Locate watchlist item (TAIC, Watchlist, Technologies to track and locate, first published January 2015, last updated October 2021) in which the Commission suggested that transport regulators encourage and, where reasonable, require operators of transport vehicles to use tracking and location technologies.
- In the maritime context the watchlist item draws on two fatal maritime accidents, the circumstances of which are not too dissimilar to the Enchanter accident (Maritime Inquiry MO-2006-204, Fishing Vessel Kotuku, Capsized, Foveaux Strait, 13 May 2006 (six fatalities) and Maritime Inquiry MO-2012-201, Fishing Vessel Easy Rider, Capsize and Foundering. Foveaux Strait, 15 March 2012), In both cases the consequences of each accident could have been reduced had tracking technologies such as an EPIRB or AIS been available. No recommendations were made in either of these reports to mandate the installation of AIS on these small commercial vessels because having it would not necessarily alert authorities that an accident had occurred.
- However, we now recognise the potential benefit of AIS as a SAR tool to guide searchers directly to the scene (as an EPIRB would when activated), particularly with the increased use of satellite-based AIS and the much broader coverage around the coast that it affords. AIS units have also become much smaller and cheaper to install. They are increasingly being installed on smaller commercial and recreational craft.
- The Commission has made a recommendation to the Director of Maritime New Zealand to mandate the installation of AIS on certain categories of vessels, with a focus on those that present a higher risk – those that carry passengers outside inshore limits.
Search and rescue
Safety Issue: New Zealand does not have readily available and suitable resources that can be assigned to search and rescue operations in the following operational areas:
- helicopters that are fully equipped and crewed for extended SAR operations across New Zealand and its coastal waters
- medium-range fixed-wing aircraft designed, equipped and crewed for SAR operations across New Zealand coastal waters and the exclusive economic zone (EEZ)
- vessels that are designed, equipped and manned by crew practised at conducting SAR operations out to offshore limits.
Safety Issue: There is currently no dedicated programme that requires organisations that operate SAR assets and might routinely be assigned on-scene coordinator status to engage in joint training with the RCC to ensure consistency in knowledge of the SAR framework and terminology.
- It is generally accepted that no two SAR operations are the same, making it difficult to follow a single standard SAR procedure. Consequently, there are almost always new lessons arising out of every SAR operation that can be applied to continuously improve future SAR operations. The following analysis should be read in that context.
- In New Zealand, coordinating SAR events is made more difficult because there are few readily available air and surface assets fit for extended SAR operations, particularly for remote areas. There is also a shortage of people trained to common standards to crew those assets.
- If these two issues were remedied, then SAR operations could be streamlined, more efficient and therefore more effective. There may be opportunities to do so if synergies between potential multiple-user agencies were to be explored. We discuss this in relation to each sector in the following section. First though, there needs to be an acknowledgement of the RCC’s performance in managing the challenging Enchanter SAR operation and that of the various participating parties. Whilst there are some lessons arising from the operation, these need to be taken in context of the current structure of the SAR system and the challenges this can pose for the various participants.
- The NEST helicopter based at Whangarei was the first asset to be tasked.56 NEST prepared the aircraft and assembled its crew based on what they had been told. They assumed the worst case and took the time to prepare accordingly. It is generally acknowledged that locating and winching people from the water into a helicopter in the dark during inclement weather is a high-risk activity. This rescue of the survivors was probably on the edge of the helicopter and crew’s capability. The NEST helicopter crew’s expertise was instrumental in five people from the Enchanter surviving.
- The Enchanter SAR operation is considered by those involved as at the upper end of challenge and complexity, and yet it only involved one 16-metre vessel with 10 people on board, very close to the New Zealand coast. At any time in New Zealand, there are likely to be much larger vessels with more people on board operating in even more remote areas than North Cape. The Commission has considered the accident on that premise.
- It is also important to acknowledge that very little was known in the initial stages of the Enchanter SAR operation. The operation started with a single activation of the Enchanter’s EPIRB, with no indication whether it was real or an inadvertent EPIRB activation. Once it had been established that the emergency was real, the response plan was formed – but still with little information about the situation. The broad plan evolved and was refined as more information was received. In those initial stages there was no indication that it could evolve into an almost two-day SAR operation involving multiple air and surface assets.
SAR helicopters
- New Zealand’s fleet of air ambulance/rescue helicopters is primarily used for air ambulance work (95 per cent). The other 5 per cent is for SAR work. The rescue helicopter fleet is divided into three sectors: Helicopters South Island, Helicopters Lower North Island and Helicopters Upper North Island. Each helicopter operator is contracted to the National Ambulance Sector Office (NASO). NASO set up the Airdesk mainly to coordinate the dispatch of rescue aircraft in support of NASO (see Figure 23).
- The NASO contracts outlined the availability and capability that helicopter operators must provide to NASO. Consequently, rescue helicopters are of the type and configuration that supports air ambulance work, rather than SAR work. Also, air ambulance work is the main priority. If the RCC requests a rescue helicopter to be tasked to a SAR operation, it may or may not be available for SAR work depending on what air ambulance work is in progress or planned.
- When the RCC contacted the Airdesk and requested a rescue helicopter based out of Whangarei, the NEST helicopter was not engaged on air ambulance work, so was immediately available. The ARHT helicopter that was requested and tasked to support the NEST helicopter was returning from an air ambulance task and was then made available. The second AHRT helicopter that was later tasked had been engaged in air ambulance work but was also available after sourcing an appropriate crew.
- There were delays in dispatching all three helicopters as each operator reconfigured the aircraft from air ambulance work to SAR work and sourced the appropriate crew for winching over water.

- Rescue helicopters are limited in size because of the maximum weight restriction for most hospital helipads. This affects their SAR people-carrying capability and flight range. For example, when the NEST helicopter retrieved the first three survivors from the inverted flybridge, its seating capacity was exceeded, with one survivor having to be seated unrestrained on the floor. There was no room for retrieving the other two passengers from the inverted hull without making the return trip to the Te Hapua forward command post.
- Another issue is the funding of SAR specific equipment for helicopters. The onboard medical equipment is mostly funded by NASO for air ambulance work. Any additional SAR-related equipment is funded by the helicopter operator. With SAR work providing only 5 per cent of operational time, it can be difficult for the operator to recover the additional cost of this equipment.
- Most rescue helicopter crew use night-vision goggles for flying and searching at night. None of the aircraft tasked to the Enchanter SAR operation were equipped with fixed gyro-stabilised or portable thermal-imaging equipment, which is particularly useful when searching for living people in large spans of water. Fixed gyro-stabilised thermal-imaging equipment creates a significant weight penalty on helicopters that are often already up to all-up maximum weight with the medical equipment, medical personnel and patients on board.
- The RNZAF operates a fleet of eight NH90 helicopters that are larger and have a longer range than most standard NASO-contracted rescue helicopters. Although winch capable, they were not rated for ‘wet winching’ at the time of this accident. The RNZAF helicopter crews are trained in and routinely practise search and rescue. They are tasked by RCC from time to time but not as often as they once were. There used to be an NH90 permanently located in South Island that was used almost exclusively for SAR operations. Anecdotally a policy has evolved, or a directive made, that they should not be tasked when a commercial helicopter is available and can be used. It is not clear by whom and when this policy was put in place.
- Currently all eight NH90s are located at the RNZAF Ohakea Air Force Base in North Island. The RNZAF has a performance agreement to have one NH90 helicopter always available for SAR work at two hours’ notice. There is an opportunity to explore potential synergies between RNZAF and SAR to make better use of the NH90 fleet (or any other fleet operated by Defence Joint Forces) to enhance New Zealand’s SAR capability.
SAR helicopter crews
- With the current SAR framework, air crews for NASO-contracted operators comprise pilots, co-pilots, doctors and critical care paramedics. It can at times be unclear whether a task is related to air ambulance or SAR work, or both. For example, when a rescue helicopter is tasked to search for and recover a person known to be injured, there can be an element of search and, because it is known that a person requires medical attention, there is the requirement for an air ambulance, which the helicopter fulfils as well. Therefore, there can be an obvious crossover of roles within the helicopter crew.
- The crew roles that are specific to SAR work are rescue swimmers and winch operators although, in the scenario described above, the winch operator can be required for both air ambulance and SAR work. One issue that arises is the cost of training and retaining crew specifically for SAR work, particularly when it represents only five per cent of revenue-earning helicopter operations. A second issue is the standardisation of training for these roles.
- To resolve this issue some critical care paramedics also train as rescue swimmers and/or winch operators. This creates another potential issue – critical care paramedics are often employed by air ambulance operators for NASO, thus creating a potential tension in assigning tasks and responsibility.
- All three rescue helicopters tasked to the Enchanter SAR operation encountered issues assembling a complete crew with sufficient experience for the high-risk task. There were consequential delays. The reasons varied from there being a general shortage of experienced winch operators and rescue swimmers, to several being given annual leave at the same time by their primary employers, who are primarily concerned with ambulance services (NRHL has since acquired full-time critical care paramedics). If the first rescue helicopter tasked had been responding to air ambulance work, it would likely have been airborne within about 20 minutes. By the time the helicopter had been transitioned from air ambulance to SAR mode and the appropriate crew assembled, it departed 85 minutes after having been tasked. This is not a criticism of the crew. They were rightfully assessing the risks of the operation and doing the best allowed by the system in which they were operating.
- Training of crew for rescue helicopters is conducted and funded by the helicopter operator to meet the standards set out in the NASO Aeromedical and Air Rescue Standard. The Standard provides detailed requirements for medical operations, but not for winch operators and rescue swimmers. They are simply required to have ‘completed a course of training that meets current accepted practice and be certified by an approved person, with competency checks completed at 12-month intervals and recorded’. An approved person is an operator’s check and training pilot or winch operator, as designated within the company’s operating exposition approved by the Civil Aviation Authority.
- There is no definition of ‘current accepted practice’. There is no mandated or recommended training syllabus. This means the training standards may vary significantly between operators across the country. This has proven to be problematic when crew move between operators.
- The issue arises because of a regulatory gap. Medical staff are governed by ambulance and NASO standards. Flight crew (pilots) are governed by civil aviation rules. Rescue swimmers and winch operators are not governed by any specific standards. The NZSAR Council and the NZSAR Secretariat only provide strategic oversight and governance for the SAR sector. They do not currently have the mandate to set standards for the sector.
- In contrast, the Australian SAR framework operates to a strict set of standards that ensures there is consistency and safety across the entire sector.
Fuel supply
Safety Issue: The national availability of fuel for helicopters likely to be engaged in extended SAR operations in remote areas is not well documented or understood by the SAR coordinating authorities.
- NEST had purchased a 1200 litre fuel trailer to be kept at Kaitaia Hospital. Fuel supply for helicopters in the Far North was limited and its scarcity was affecting their air ambulance operation, which was essentially based around Kaitaia Hospital. This fuel trailer was the furthest north permanent supply of Jet A1 fuel available to aircraft.
- Helicopter pilots are responsible for ensuring their aircraft have sufficient fuel to safely conduct their tasks. Helicopter operators are responsible for ensuring their total fleet has a sufficient supply of fuel to support their operations. This is not difficult for routine tasking. However, SAR operations are anything but routine. The Enchanter SAR operation began as a one-helicopter and then two-helicopter operation with an unknown end point. It grew into a multiple-aircraft multi-day operation.
- While individual pilots and helicopter operators can manage their fuel on a task-by-task basis, they do not have the oversight that the RCC has as the SAR plan evolves. There is therefore some responsibility on the RCC’s part to prompt pilots/operators about fuel supply before it becomes an issue for the aircraft it is tasking and renders them inoperative with consequential delays to the SAR plan.
- The RCC began inquiring about sourcing fuel shortly after midnight on the day of the accident. Fuel was eventually sourced once the RCC learned that the NEST helicopter was grounded at Kaitaia Hospital, but it took several hours before fuel reached the two helicopters at Kaitaia Hospital and the Te Hapua forward command post. During the 46-hour SAR operation the RCC made 29 phone calls trying to source fuel, adding to the already full workload of the coordinating staff.
- The lack of available fuel in the region resulted in a four-and-a-half-hour period in which helicopters were unable to search for the remaining five people in the water.
- Caching fuel for extended air operations in remote areas is not straight forward. Fuel has a shelf life and can deteriorate over time. The quantity and quality of fuel require careful management. However, there will be opportunities to synergise the requirement of caching fuel in remote areas with routine aircraft operations. The Commission has recommended that the Secretary for Transport work with SAR coordinators and providers of SAR air assets across New Zealand to identify opportunities for caching fuel for extended SAR operations in remote areas, and to establish and maintain a database of identified stored fuel and fuel supply logistics.
Fixed-wing aircraft
- Fixed-wing aircraft are important for SAR operations. While they do not have the rescue capability of helicopters, they provide an important cost-effective search function. The Enchanter SAR operation has highlighted issues with the availability of suitable fixed-wing aircraft for SAR operations.
- The P-3K2 provided an ideal communications platform, making it suitable as an on-scene coordination asset. The P-3K2 crew were able to relay information to the RCC, and direct other assets to search various debris fields. The aircraft also had a thermal imaging suite capable of detecting large objects in the water such as vessels. However, the suite was not ideally suited for detecting small objects in the water such as people. The P-3K2 was ideally suited for long-range SAR operations, which is important considering New Zealand’s vast SAR area.
- On the night of the response, rain squalls were moving through the area. The associated cloud hindered the view from the P-3K2, requiring them to fly at low altitude beneath the cloud. Operating a large aircraft at low altitude at night meant it had to stay further offshore than the actual scene, to maintain a safe clearance from terrain.
- The Coastguard operates two Cessna aircraft, one based at Ardmore in Auckland, and one based at Kerikeri in the Far North. The RCC tasked these aircraft during daylight hours. The aircraft offered a cost-effective (they are both totally funded through Coastguard New Zealand) search solution for the Enchanter SAR operation. They were able to fly close to shore in areas that the P-3K2 could not. However, they have limitations. There are only two and they are both based to cover the Auckland and Far North areas only, thus limiting their use for other regions. The aircraft are restricted to daylight operations, and subject to visual flight rules (Civil Aviation Authority criteria essentially limit their use to good weather when the pilot can navigate visually without the aid of instruments). Their SAR capability is limited to visual observation and radio direction-finding equipment.
- New Zealand has a long coastline to cover for SAR operations. There is an opportunity to introduce a medium-sized aircraft suitably equipped for SAR operations at a lower operational cost than the larger aircraft available. Such an aircraft would be better suited to SAR operations such as with the Enchanter and could also prove more efficient for medium-range SAR operations to South Pacific islands. There is also an opportunity to use these aircraft for other NZDF operations, and those of other Government departments, such as Fisheries New Zealand and New Zealand Customs.
-
The Commission raised this possibility in its Preliminary Report to the Royal Commission of Inquiry into the sinking of the interisland passenger and freight ferry MV Princess Ashika on 5 August 2009 (Maritime Inquiry MO-2009-209, Final Preliminary Report prepared by the Commission for the Royal Commission of Inquiry into the sinking of the MV Princess Ashika). The recommendation was:
[New Zealand] to explore the possibility of dedicated search and rescue aircraft fitted with SAR equipment and trained crew being made available to conduct search and rescue operations in the New Zealand and Fiji SAR areas. Such an aircraft could be multi-purpose to conduct other maritime and land-based activities such as customs and Fisheries.
- Australia uses such an aircraft for its SAR operations, which has proven successful. The Commission has made a recommendation for the Ministry of Transport to explore this opportunity.
Surface vessels
- There is an issue with New Zealand having sufficient readily available and suitable surface vessels for participating in challenging and extended SAR operations, not dissimilar to the issue with aviation assets described above.
- The NZ Police has two maritime units, one based in Auckland and one in Wellington. These assets are primarily for addressing crime and supporting the NZ Police Dive Squad. They are suitable for SAR operations, but their availability is limited to the areas where they happen to be located, primarily the Greater Auckland and Wellington areas. The Auckland NZ Police launch did not participate in the Enchanter SAR operation.
- The RNZN also has several assets suitable for SAR operations, but again their availability will be determined by their current location. The RNZN’s service agreement requires it to have one vessel available for deployment out of Auckland at 12 hours’ notice.
- The HMNZS Taupo was coincidentally operating in the Hauraki Gulf, Auckland at the time of the Enchanter accident. The commander responded to the mayday relays and proceeded to the area, sailing into heavy weather and arriving on scene at 1110 the following day.
- When the HMNZS Taupo did arrive, the RCC handed over the on-scene coordinator role to the commander. However, the RNZN was not familiar with the term and assumed the naval warfare role of on-scene commander, which effectively took control away from the RCC. The issue was eventually realised and addressed but not before the coordination of the search patterns had been disrupted for a number of hours.
- The issue is likely due in part to the lack of joint SAR training between the RNZN and the RCC. RNZN personnel are trained in basic SAR techniques, but not in rescue coordination. Ideally, it should be standard practice for organisations routinely used as on-scene coordinators to be trained in and familiar with RCC procedures, and that practice be documented in the overarching SAR system. The Commission has made a recommendation for the Ministry of Transport to address this issue.
- Coastguard has multiple assets spread strategically across all New Zealand regions. The organisation is a charity relying entirely on volunteers and raises approximately 70 per cent of its operating income from donations, membership, and grants (the remaining 30 per cent of costs is met by a government service level agreement). While the organisation is considered to be the primary SAR service in New Zealand, most of its work involves responding to recreational boat events, providing fuel for boaters who have run out or towing to safety those that have broken down.
- The funding model does not support the build and operation of larger craft capable of operating offshore. Consequently, their craft are primarily designed for inshore events and less so for serious complex extended SAR operations, as is the training provided to their volunteer crew. That is not a criticism of their performance. They are renowned for providing a good and efficient service. The rescues they perform will often prevent an event escalating to one requiring a SAR response.
- There are two other limiting factors: not all Coastguard boats are surveyed to operate outside of inshore or restricted coastal limits; and the qualification that Coastguard can issue to their volunteer skippers restricts them to operating within 12 miles of the coast (Coastguard vessels may be granted permission by Maritime New Zealand to go beyond restricted limits for the purposes of SAR if required).
- Houhora is home to the northernmost Coastguard unit in the country. Coastguard Houhora relies on volunteers to maintain and operate a 9.5-metre rigid-hull inflatable boat (RHIB) (this has since the accident been replaced with a 10-metre RHIB) to provide services from Cape Reinga to Doubtless Bay (see Figure 24).
- Coastguard Houhora had received the initial notification of the distress at 2035, while Houhora was still experiencing heavy winds associated with the passing storm system.
- As with any notification, the Coastguard Houhora unit conducted a risk assessment to ensure their own safety. After consulting with local operators, and with the duty officer and SAR coordinator at Coastguard New Zealand operations centre, it was determined that the risk of responding would be too high. The decision not to deploy was appropriate in the circumstances.
- With Coastguard Houhora unable to respond that night, HMNZS Taupo being some distance away, and there being no commercial vessels in the immediate area, there were no surface vessels available to participate in the Enchanter SAR operation until about eight hours after the accident.

Commercial Vessels
- The use of commercial vessels of opportunity during SAR operations is common practice throughout the world as they are often likely to be nearest to the scene. International law under the United Nations Convention on the Law of the Sea (UNCLOS) Article 98 also requires masters of vessels to respond to distress unless it endangers the vessel and/or its crew.
- During a SAR operation the RCC will use any available asset that is able to assist. The lack of professionally crewed marine assets suitable for offshore SAR operations means SAR coordinators have fewer options for surface assets, which increases their dependency on untrained civilian vessels of opportunity. Using commercial vessels in a weather-related event like the capsize of the Enchanter, often means that other vessels may not be in the immediate area.
- During the Enchanter SAR operation, the RCC had tasked five commercial vessels to aid in the search. Of the five vessels, one was another charter fishing boat owned by Enchanter Fishing Charters, while the other four were commercial fishing boats.
- The crews of these vessels (some of whom had children on board), had the challenge of searching for long periods of time and sighting and recovering deceased victims from the sea.
- Professional SAR personnel have resources and support available to help them to deal with the mental toll this type of work can take. Civilians do not necessarily have access to that same support. It should be noted that at the conclusion of the Enchanter search, individuals who were involved were made aware of available mental health services.
Appendix 1. Wave formation and characteristics
The survivors described the Enchanter being knocked down by a large steep wave. The following information provides context to Section 3 of this report.
Wave formation
The size and behaviour of waves are determined by a range of factors, from the direction of the swell to the speed of the tide, prevailing ocean currents, the depth of the water, the shape of the seafloor, the presence of reefs and sandbanks, and even the temperature of the ocean (Australian Bureau of Meteorology).
However, wind is the primary factor that governs the size of the waves. Waves are caused by wind blowing over the surface of the ocean and transferring energy from the atmosphere to the water. The height of waves is determined by the speed of the wind, how long it blows, and crucially the ‘fetch’ (the distance that the wind blows in a single direction over the water).
Bigger waves result from conditions that cause strong winds to blow for a sustained period over a large expanse of ocean. The resulting waves can travel for hundreds or even thousands of kilometres, smaller waves being absorbed by larger ones, faster waves overtaking slower ones, all gradually growing and arranging themselves into the regular ‘sets’ or wave trains65.
The result of these interactions is that it is normal to experience a wide range of wave heights when on the water.
‘Significant wave height’ is the international convention (devised by oceanographer Walter Munk during World War II) used to describe the size of swell and wind waves (or ‘sea waves’) in coastal forecasts. Significant wave height is defined as the average wave height, from trough to crest, of the highest one-third of the measured or observed waves.
Figure 25 shows that a mariner will experience a typical ‘wave spectrum’ containing a low number of small waves (at the bottom) and a low number of very large waves (at the top). The greatest number of waves is indicated by the widest area of the spectrum curve. The highest one-third of waves is highlighted in dark blue, and the average height of waves in this group is the significant wave height.

While the most common waves are lower than the significant wave height, it is statistically possible to encounter a wave that is much higher – especially if you are out in the water for a long time. It is estimated that approximately one in every 3,000 waves will reach twice the height of the significant wave height – roughly equivalent to three times every 24 hours.
Wave energy and wave changes with depth
As the energy of a wave passes through water, the energy sets water particles into orbital motion, as shown in Figure 26. Water particles near the surface move in circular orbits with diameters approximately equal to the wave height. The orbital diameter, and the wave energy, decreases deeper in the water. Below a depth of half the wavelength, water is unaffected by the wave energy.
Swells are deep-water waves, meaning that the depth of the water is greater than half the wave’s wavelength. The energy of a deep-water wave does not touch the bottom in the open water (see Figure 27).
When deep-water waves move into shallow water, they change into breaking waves. When the energy of the waves touches the ocean floor, the water particles drag along the bottom and flatten their orbit.

Because of the friction of the deeper part of the wave with particles on the bottom, the top of the wave begins to move faster than the deeper parts of the wave. When this happens, the front surface of the wave gradually becomes steeper than the back surface.
Waves travelling in water where depth is less than half the wavelength but greater than one-twentieth the wavelength are referred to as transitional waves, which are often wind-generated waves that have moved into shallower water.

Rogue Waves – comment from the United States National Oceanic and Atmospheric Administration
Rogue, freak or killer waves have been part of maritime folklore for centuries but have only been accepted as real by scientists over the past few decades.
Rogues, called 'extreme storm waves' by scientists, are those waves that are greater than twice the size of surrounding waves, are very unpredictable, and often come unexpectedly from directions other than prevailing wind and waves.
Most reports of extreme storm waves say they look like "walls of water." They are often steep-sided with unusually deep troughs.
Since these waves are uncommon, measurements and analysis of this phenomenon is extremely rare. Exactly how and when rogue waves form is still under investigation, but there are several known causes:
Constructive interference – extreme waves often form because swells, while travelling across the ocean, do so at different speeds and directions. As these swells pass through one another, their crests, troughs and lengths sometimes coincide and reinforce each other. This process can form unusually large, towering waves that quickly disappear. If the swells are travelling in the same direction, these mountainous waves may last for several minutes before subsiding.
Focusing of wave energy – when waves formed by a storm develop in a water current against the normal wave direction, an interaction can take place that results in a shortening of the wave frequency. This can cause the waves to dynamically join together, forming very big 'rogue' waves. The currents where these are sometimes seen are the Gulf Stream and Agulhas Current. Extreme waves developed in this fashion tend to be longer lived.
Appendix 2. The Enchanter’s stability information
- Part of a stability analysis is to calculate what is called a GZ Curve. GZ is the theoretical righting lever that forces a vessel back upright when it is heeled by any forces such as wind and waves. The longer the GZ lever, the more force is imparted to return the vessel upright. If a vessel has a negative GZ righting lever, then the force is acting to capsize the vessel rather than returning it upright. In Figure 28, when the vessel is upright (left) the upward thrust of buoyancy (B) is equal to and vertically aligned with the downward weight acting through the vessel’s centre of gravity (G). The vessel is floating in equilibrium when force of G equals B.
- When the vessel heels due to wind and/or waves (right), the position of the vessel’s centre of gravity (G) remains the same but the position of the centre of buoyancy moves across to the new centroid of the underwater volume (B1). The upward thrust through B1 is no longer aligned with G. A righting lever (GZ) is thus created, which in this case tries to return the ship upright until G and B align again. The length of the righting lever GZ changes as the vessel heels through a range of angles.

- For any given stability condition, a range of values for GZ can be calculated and plotted on a graph showing the length of GZ on the X axis against the angle of heel on the Y axis. This graph is the GZ curve mentioned above. Figure 29 shows the calculated GZ curve for a typical stability condition that the Enchanter had when nearing the end of a voyage. The value of GZ starts off at zero when there is zero angle of heel and then steadily increases as the angle of heel increases. The length of the righting lever GZ peaks at a heel angle of 33.8 degrees and then begins to decrease as the angle of heel increases beyond 33.8 degrees.
- The value for GZ reaches zero at a heel angle of 77 degrees. This is known as the angle of vanishing stability. If the Enchanter heeled past 77 degrees, the value of GZ becomes negative. At that point GZ becomes a capsizing lever and the vessel will capsize.


Appendix 3. Maritime Rules Part 40C
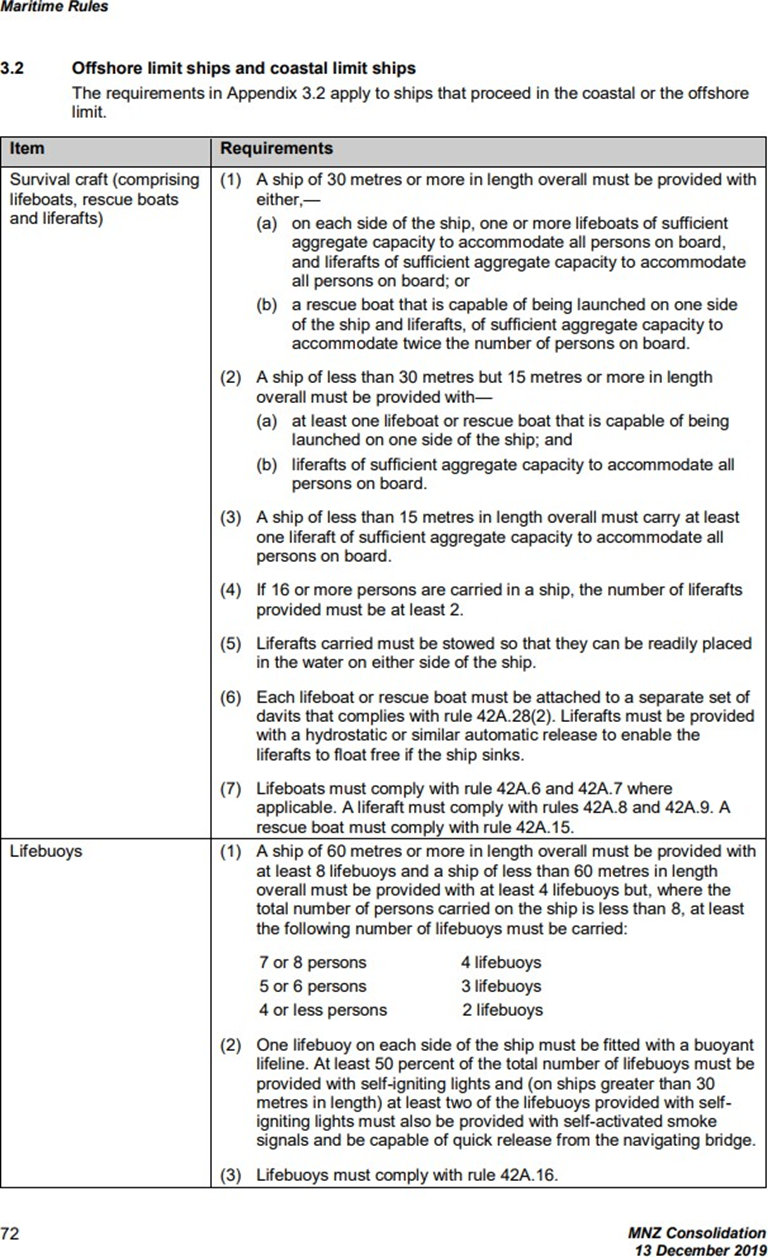
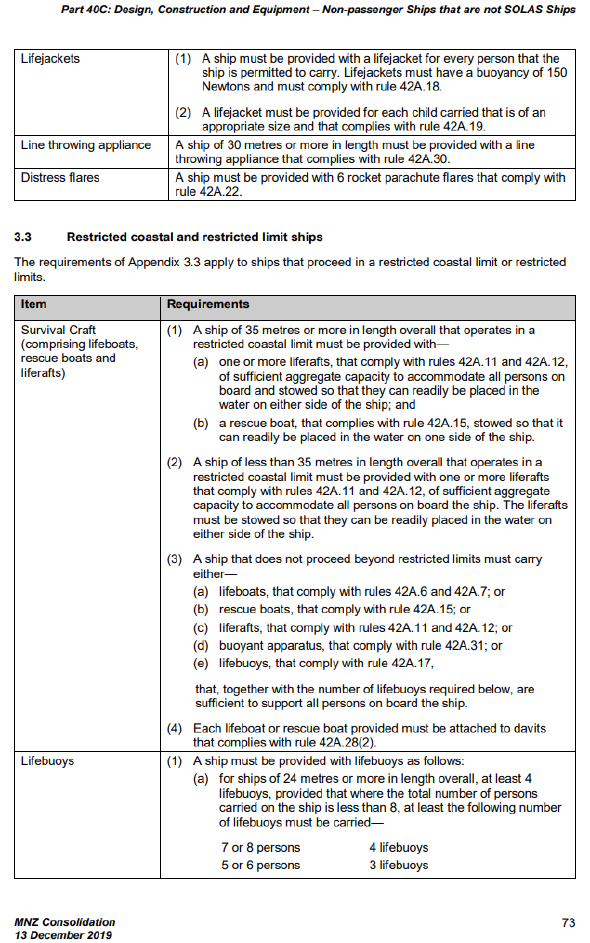
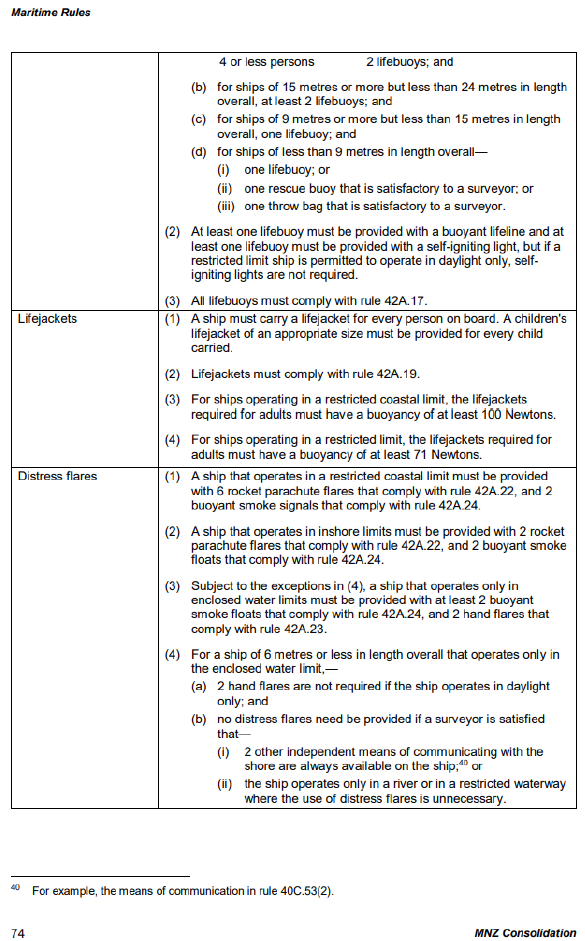
Appendix 4. Post-salvage inspection



Appendix 5. Expert analysis of EPIRB data
The Enchanter Capsize, description of EPIRB transmissions – 20 March 2022 (all times in UTC)
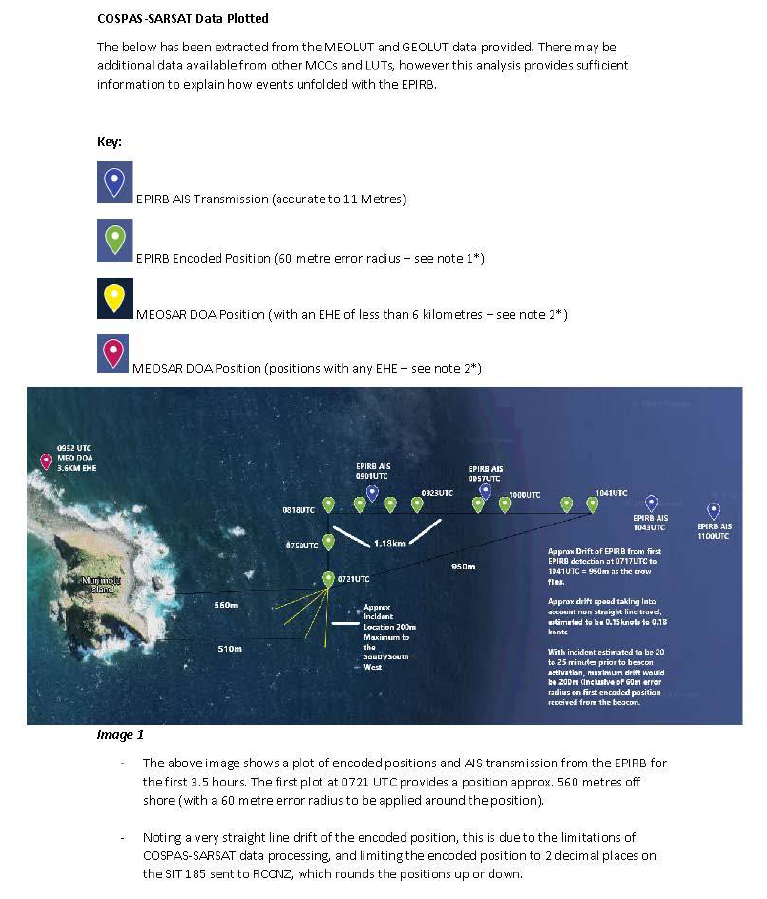
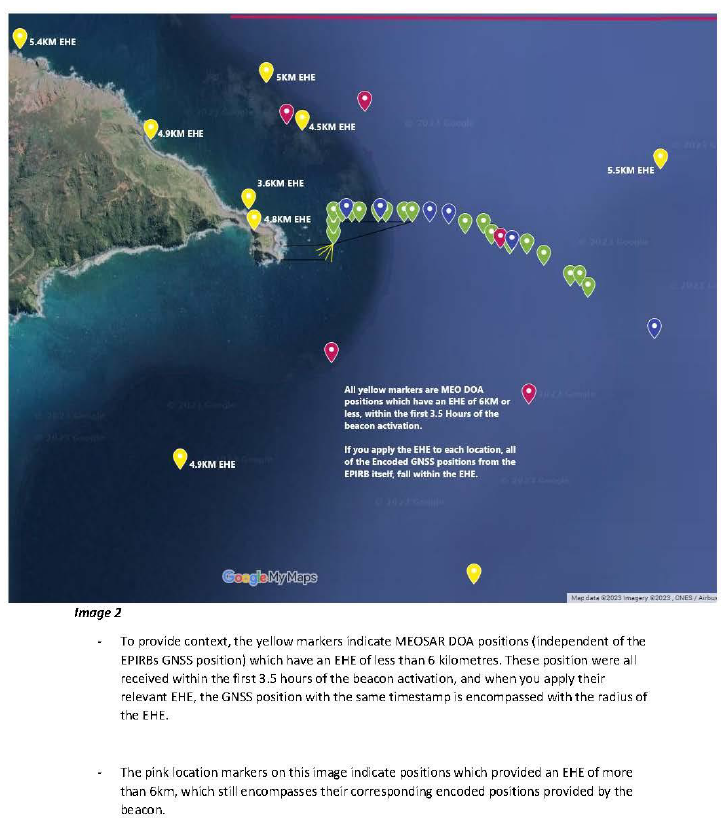
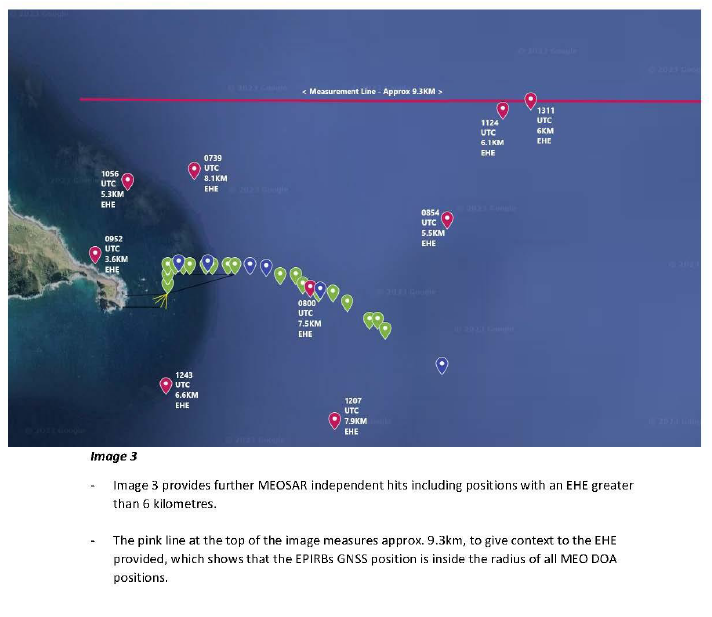
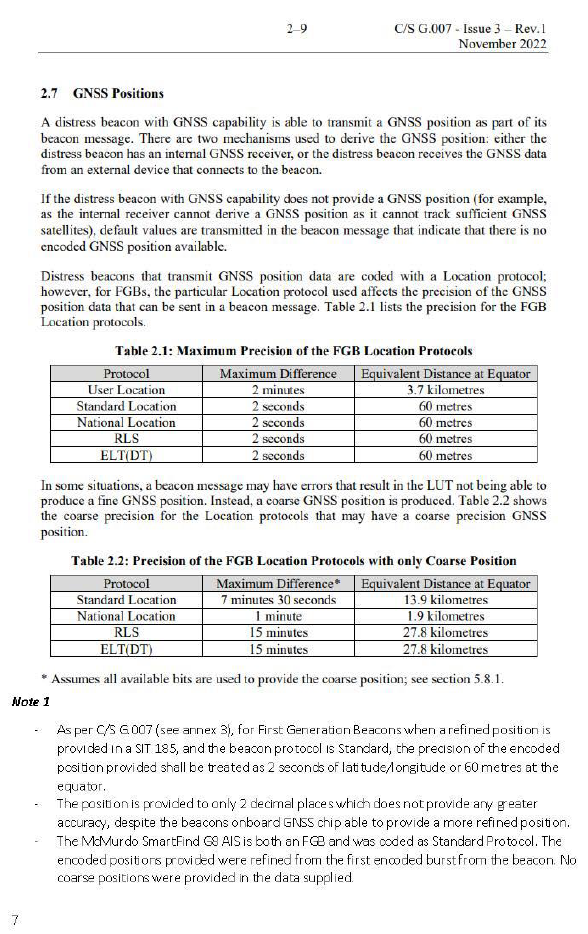
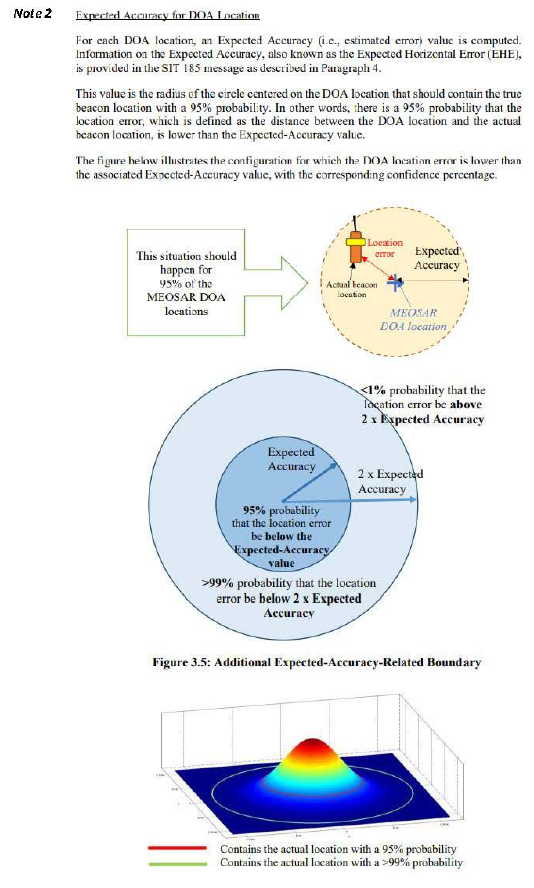
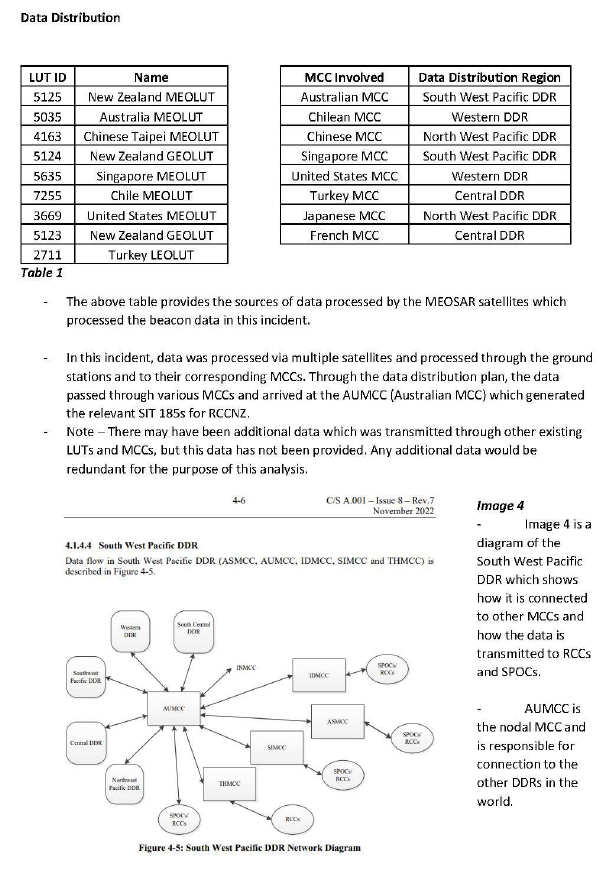

Appendix 6. Rescue helicopter flight data (TracPlus data)
Flight data from the rescue helicopter confirms that the first rescue helicopter on scene retrieved the three survivors from the flybridge within 61 metres of the EPIRB’s encoded position (see Figures 33 and 34).

